ロボット人形
オープンソース
オープンソースはロボット産業において非常に重要な意味を持ちます。
これまで、アメリカのMITのミン・チーター四足ロボットが全てオープンソースであったことは、関連技術革新や産業協力を大いに推進し、関連するロボット開発のハードルを大幅に低下させ、四足ロボットが全世界で花開くことに寄与し、ますます多くの研究開発チームが製品の開発と産業化に参加し、自らのアイデアを検証することができました。これは、間違いなく世界の資源共有と産業協調を加速させ、ロボット時代の到来にさらなる可能性をもたらしました。
ヒューマノイドロボットは現在最も注目されているロボット分野の一つであり、人々が最も期待している製品の一つです。しかし、ヒューマノイドロボットのソフトウェアとハードウェアの統合開発は非常に難しく、安定して効率的に動作するヒューマノイドロボットを作るためには、機械設計、電子工学、コンピュータサイエンスなどの多くの分野の技術を総合的に習得する必要があり、感知や制御アルゴリズムに関する深い研究と開発が求められ、費用もかなりかかるため、研究者や開発者が少なくなり、ヒューマノイドロボット本体に基づいた人工知能や機械学習のさらなる研究も制限されています。

では、ソフトウェアとハードウェアがオープンソースのヒューマノイドロボットが、ヒューマノイドロボット研究の加速スイッチを押せるのでしょうか?
オープンソース製品の概要
最近、ロボット大講堂は、国内の企業である【インクスインテリジェンス】と【橋介数物】が、二足歩行ロボットをオープンソース化する計画を進めていることを知りました。具体的には、基盤となる制御アルゴリズムとハードウェア構造を含みます。ロボット大講堂はこのロボットの独占的な製品パラメータを入手しました。

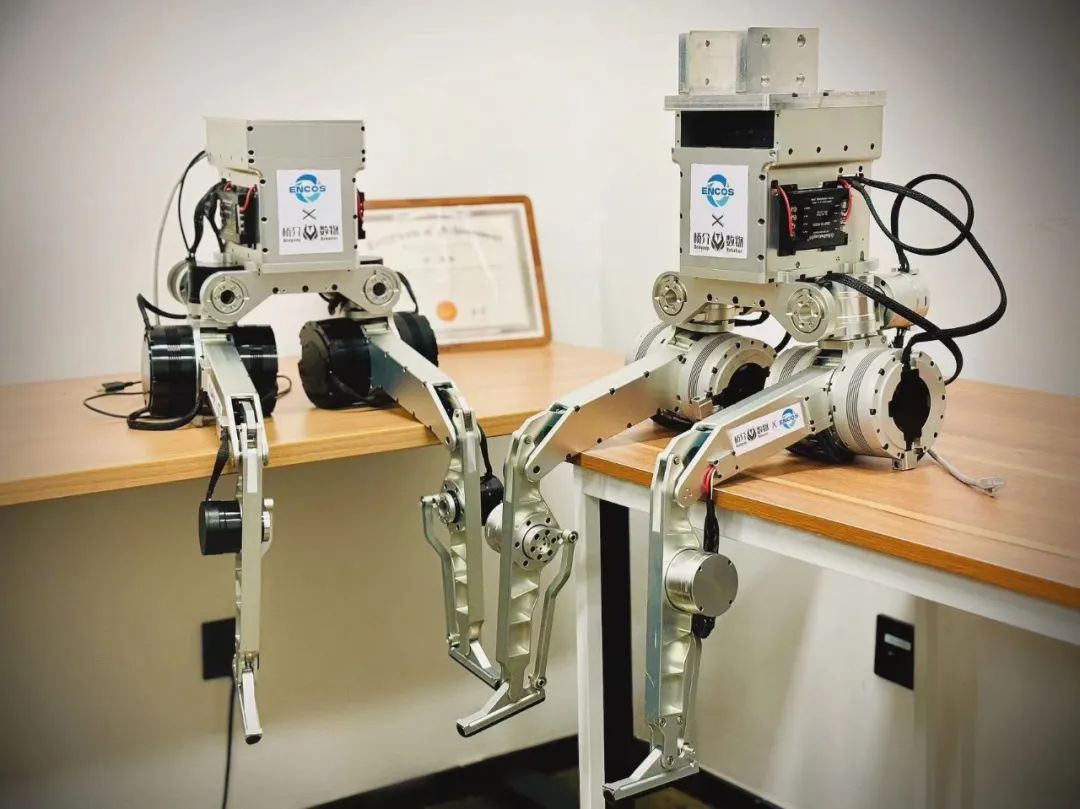
外観から見ると、このオープンソースのヒューマノイドロボットEC-Hunter80-V01は独特の脚部デザインを持ち、上半身と腕がありません。さらに、現時点では不要なロボット外観部品を取り除き、最も基本的な構造部品のみを保持し、ロボットが余分な部品を持たず、最大限の軽量化を達成しています。これは、国外のAgility Robotics社が下半身にクラシックな「オーストリッチの足」を採用したヒューマノイドロボットのプロトタイプであるキャシーに似ており、どちらも非常にシンプルなエンジニアリング機械スタイルです。現在、キャシーは上半身と腕を成長させ、Digitロボットにアップグレードされ、年間1万台の生産を計画しています。
ハードウェアのパラメータを見ると、EC-Hunter80-V01の高さは785.97mm、前後の幅は178mm、左右の幅は330.4mm、全体で10自由度を持ち、本体の重さは約12kgです。このロボットは5300mAhのリチウムバッテリーを搭載しており、このバッテリーパックは統一されたバッテリーマネジメントシステムを備えていませんが、電源の電量表示と低電量警報を実現できます。ロボットには5V10Aと19V12.5Aの2つの電源ラインインターフェースが装備されています。制御システムと電動部品のオープン性、互換性は非常に良好です。

制御モジュールでは、EC-Hunter80-V01はnucwski7制御プラットフォームとEtherCAT制御インターフェースを採用しています。EtherCATインターフェースは、インクスインテリジェンスが自社開発した高速EtherCATからCANへのモジュールを使用しており、1つのモジュールで6つのモーターが最高1kHzの通信フレームレートを実現でき、2つのモーターを持つモジュールで最高2kHzの通信フレームレートを実現できます。
EtherCATからCANへのモジュールを採用することで、Linuxシステムと関節モーター間の接続が容易に解決できます。CAN通信は高い信頼性、強い干渉耐性、低コスト、インターフェースの小型化などの利点がありますが、EtherCATはRJ45ポートを使用してサイズが大きく、一度に大量のデータを送信できるため、Linuxなどのシステムとの接続が容易です。そのため、EtherCATからCANへの接続を足式ロボットで関節モジュールと制御プラットフォームの接続に使用するのは良い選択です。また、このロボットのIMUもインクスが自社開発したEtherCATバスのモジュールを使用しており、モーター制御と共通のバスを利用しています。これにより、全体のハードウェアアーキテクチャが簡素化され、通信のリアルタイム性も保証されています。
下半身の脚部のみが存在する理由は、インクスインテリジェンスが現在、二足歩行ロボットの大規模な運用を妨げている主要な技術点の一つが下肢のバランス機能であると考えているからです。これは現在、国内外の多くのロボットメーカーが重点的に克服すべき技術的課題です。したがって、ハードウェアプラットフォームとして、EC-Hunter80-V01は下半身の二足部分を重点的に保持し、ユーザーが自由にアップグレードすることをサポートしています。

アルゴリズムはヒューマノイドロボットの核心部分であり、運動制御、感知、意思決定などの異なる部分を含み、インクスインテリジェンスはモデルベースの制御方法を採用し、同時にMPC+WBCアルゴリズムフレームワークを使用しています。これにより、定位感知、歩行計画、接地計算などのモジュールを統合して足式ロボットに力を混合制御を行います。
インクスインテリジェンスはロボット大講堂に対し、EC-Hunter80-V01ロボットのコア制御コードをオープンソースする予定であり、底層のetherCAT通信、二足歩行制御アルゴリズム、歩行計画、デバッグコンポーネントを含むとしています。同時に、ロボットの全体構造や使われるハードウェアモジュールのプランもオープンソースになります。
これは、このオープンソースのロボットを基盤として、ユーザーがハードウェアを変更・改善することができることを意味します。例えば、ロボットの自由度を増加させたり、足底の指関節を追加したり、外観部品を追加したりすることが可能です。このロボットは15kgの負荷に達するため、二つの腕や四つの腕、さらには視覚システムなどを追加することができます。
また、ソフトウェアの面でも、ユーザーはすでにオープンソース化されたコードを基に、ロボットの制御アルゴリズムコードを改善することができます。例えば、強化学習アルゴリズムを追加することができ、ロボットの安定性制御が向上します。全体として修改空間と拡張自由度は非常に大きい。
インタビュー中、インクスインテリジェンスは現在このロボットのアルゴリズムは独立してオープンソース化される予定で、24年の大晦日(2月8日)前にgithubにアップロードされる予定だと言い、具体的なアドレスは(https://github.com/bridgedp )、ハードウェアプラットフォームは単独で販売される予定で、初期の価格は約18万元になることが見込まれています。
オープンソースの基盤
これほど高いオープンソース度を実現できるのは、根本的には下層の運動制御部品の自社開発によるものです。
ロボット大講堂の以前の報道「ヒューマノイドロボット部品市場の新しい機会が到来?この企業が先頭を切った中で」では、インクスインテリジェンスについて注目していました。この企業は設立してからの歴史はそれほど長くはありませんが、チームは初めにロボットの関節モジュールを研究開発していましたが、技術的には非常にユニークです。その最終製品は高いピークトルク密度と軽量性を持っています。例えば、EC-A8112-P1-18という名の製品はピークトルク90Nm、重量840g、EC-A4310-P2-36という名の製品はピークトルク36Nmで、重量はわずか377gです。

EC-Hunter80-V01というこのオープンソースの二足歩行ロボットでも軽量化の特徴が見受けられます。現在市場に流通している何十キロもあるヒューマノイドロボット本体とは異なり、EC-Hunter80-V01の本体は約十数キロであり、これによりヒューマノイドロボットの開発の便捷性や安全性が大幅に向上し、ロボットの運動制御のロバスト性も間接的に高めることができます。
これは、使用されている関節がインクスインテリジェンスの現在最も競争力のある二つの軽量化製品EC-A8112-P1-18、EC-A4310-P2-36であるからです。この二つの自社開発された関節の組み合わせは、ヒューマノイドロボットの設計構造を簡素化し、保守の難易度を低下させ、配線を減らし、異なる製品を融合させる時間を省き、ソフトとハードの全体的安定性が非常に明確であることを可能にします。しかし、性能面では、二つの製品のピークトルク密度が100Nm/kg以上に達し、これにより二足のヒューマノイドロボットの運動に強力な動力を提供します。

ロボット大講堂の情報によれば、以前、インクスインテリジェンスの主なエネルギーはモジュールの研究開発と製造に注がれており、ヒューマノイドロボットの研究を始めていなかったが、新しいユーザーへのサービスの過程で、顧客とコミュニケーションを取り、モジュールが二足歩行ロボットでの効果を検証するのに多くの時間を必要とすることが多かったため、ロボットのプロトタイプを作ることは非常に多くの時間を節約することができました。
エコシステムの形成過程で、インクスインテリジェンスはロボットアルゴリズムに特化したパートナーである【橋介数物】と出会い、相手の強みを利用してすぐにエコシステムのコラボレーションプロジェクトを開始し、両社の強みをすばやく活用してこのオープンソースの二足歩行ロボットを構築し、顧客へのサービスを向上させました。
なお、橋介数物は南科大、北航、華科、清華など国内外の大学の学部長や博士メンバーで構成されたスタートアップ企業で、ヒューマノイドおよび四足ロボットの運動制御技術とモジュール製品の開発に注力しています。チームは設立から半年、優れた研究開発力を駆使し、1か月のうちにヒューマノイド二足ロボットの安定した歩行制御をゼロから1の突破を実現しました。続いて、チームはロボットの強化学習、模倣学習などの先端分野やヒューマノイドロボットの「小脳」モジュールに持続的に投資を行っていく予定です。
両社の協力において、インクスインテリジェンスがロボットのハードウェアと下層通信ソリューションを提供し、橋介数物が適応する制御アルゴリズムを開発します。また、今後はインクスインテリジェンスがそれぞれの部分のアップグレードを担当します。
インクスインテリジェンスは、このロボットが始まりであり、終わりではないと信じており、今後、両社が長期にわたって協力し、このオープンソース版本のロボットを継続的に更新・改良していくことを望んでいます。研究開発計画の中で、将来のバージョン2.0においては、インクスインテリジェンスは1.0バージョンの基盤の上に二つの腕を追加し、3.0バージョンでは視覚を追加し、3.0バージョン以上ではロボットを約1.7mにして、ロボットが人により近づき、より多くのデモを行い、開発者のロボット研究をより簡単にすることを目指しています。

結論と未来
以前、ロボット分野のほとんどのオープンソースプロジェクトは基本的に国外から始まるものでしたが、EC-Hunter80-V01は、中国のオープンソースのヒューマノイドロボットの一つとして、現在の中国のヒューマノイドロボット産業のエコシステムが大きく進展していることを示すだけでなく、世界に向けて中国のヒューマノイドロボット分野における共有精神と深い交流のビジョンを示しています。EC-Hunter80-V01というオープンソースの二足歩行ロボットは、業界全体の発展を加速し、グローバルな一般的なヒューマノイドロボットの実用化を加速することが期待されます。
「世界のロボットオープンソースは早かれ遅かれ実現する事でしょう。それは、コンピュータのオペレーティングシステムに課金されているものやオープンソースのシステムがあるのと同じで、携帯電話のシステムにもオープンソースシステムがあります。ロボットの未来市場がこれほど大きいので、オープンソースのロボットも必然的に登場するでしょう。」とインクスインテリジェンスのCEO祝宗煌は述べました。そして、橋介数物の創設者尚陽星は、「ロボットコミュニティの発展はオープンソースの力の推進なしには成り立たず、過去、私たちもオープンソースコミュニティから多くの利益を得てきました。私たちは、ロボットコミュニティに貢献し続け、中国や世界共通のロボットの発展に尽力していきたいと思っています。」と語りました。