Humanoid Robot
open-source
The significance of open source for the robotics industry is self-evident.
Previously, the full open-source release of the Min cheetah quadruped robot by MIT in the United States significantly promoted technological innovation and industry collaboration, drastically lowering the barrier for developing similar robots. Quadruped robots have seen widespread development globally, with more and more research teams participating in product development and industrialization, validating their ideas.
This undoubtedly accelerates global resource sharing and industry synergy, contributing more possibilities for the arrival of the robot era.
Humanoid robots, being the most popular field in robotics today, are one of the most anticipated products. However, the difficulty of developing integrated hardware and software for humanoid robots is very high. To build a humanoid robot that can operate stably and efficiently requires comprehensive mastery of various fields such as mechanical design, electronic engineering, and computer science, with deep research in algorithms for perception and control, which is very costly. This results in fewer researchers and developers and limits subsequent research in artificial intelligence and machine learning based on humanoid robot bodies.

So, can an open-source hardware and software humanoid robot press the accelerator key for humanoid robot research?
An Overview of Open Source Products
Recently, AI Robotic Service Website learned that two domestic companies, 【Inke Intelligent】 and 【BridgeDP】, plan to open-source bipeds robots, including the underlying control algorithms and hardware structures. AI Robotic Service Website has obtained exclusive product parameters of this robot.

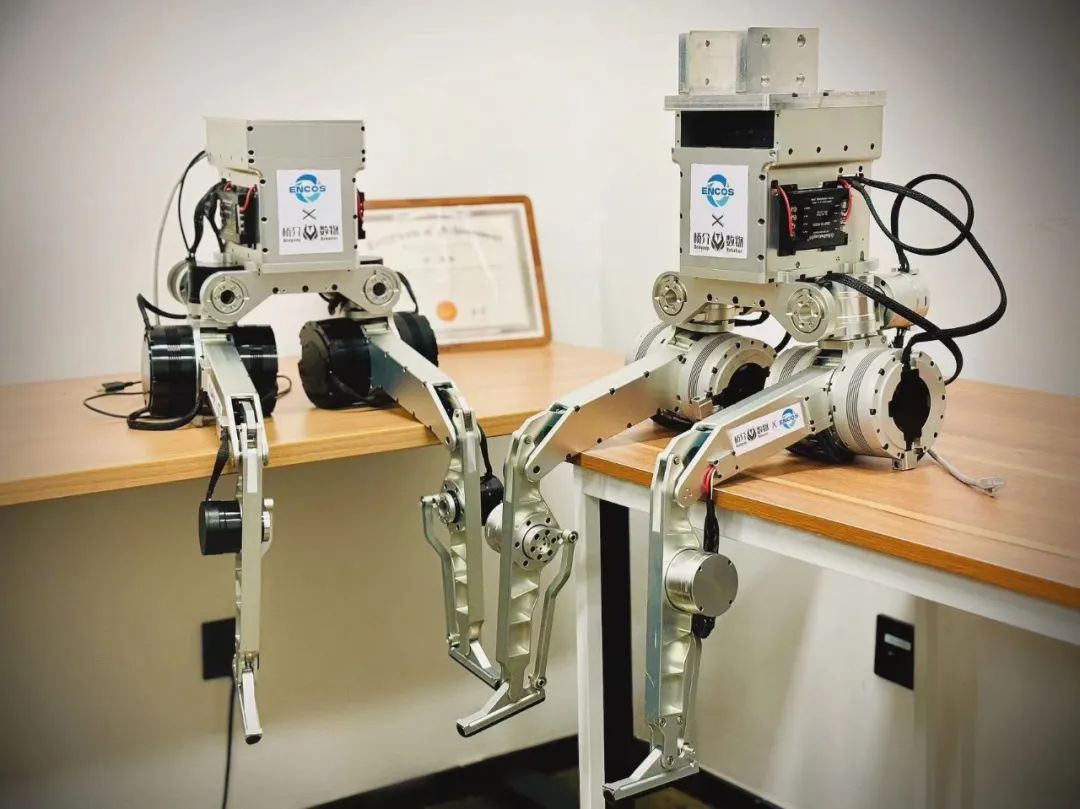
In terms of appearance, the open-source humanoid robot product EC-Hunter80-V01 has a distinctive leg design, lacking an upper body and arms, and has removed currently unnecessary robot exterior parts, retaining only the most basic structural components to keep the robot as light as possible. This is somewhat similar to the prototype of humanoid robots with the classic 'ostrich leg' design from Agility Robotics abroad, called Cassie, both featuring a minimalistic engineering mechanical style. Currently, Cassie has developed an upper body and arms to become the Digit robot, with plans to produce 10,000 units annually.
Regarding hardware parameters, EC-Hunter80-V01 stands 785.97mm tall, with a front-to-back width of 178mm, a side-to-side width of 330.4mm, possessing 10 degrees of freedom, and weighing approximately 12kg. It is equipped with a 5300mAh lithium battery. Although this battery pack does not have a unified battery management system, it can display the power and provide a low power warning. The robot includes 5V10A and 19V12.5A power line interfaces. The openness and compatibility of the control system and electrical drive components are excellent.

In terms of control modules, EC-Hunter80-V01 employs the nucwski7 control platform and EtherCAT control interfaces, with the EtherCAT interface using a high-speed EtherCAT-to-CAN module independently developed by Inke Intelligent. One module supporting six motors can achieve a maximum communication frame rate of 1kHz, while one supporting two motors can achieve up to 2kHz.
The use of an EtherCAT-to-CAN module conveniently solves the connection between the Linux system and joint motors. CAN communication is highly reliable, resistant to interference, cost-effective, and compact, while EtherCAT uses RJ45 ports, which are large but capable of transmitting large amounts of data at once, facilitating connection with systems like Linux. Thus, using EtherCAT-to-CAN as the connection between joint modules and control platforms in biped robots is a wise choice. Additionally, we also note that the robot's IMU uses a module on the EtherCAT bus independently developed by Inke, with the motor control running on the same bus. This not only simplifies the hardware architecture of the entire machine but also ensures real-time communication.
The only lower body part with legs is due to Inke Intelligent's belief that one of the main technical points hindering large-scale application of biped robots is the movement balance of the lower limbs, which is currently a key technical challenge for major robotics manufacturers both domestically and abroad. Therefore, in the hardware platform, EC-Hunter80-V01 focuses on retaining the lower limb biped part, while supporting free upgrades by users.

The core of humanoid robots lies in algorithms, including various parts such as motion control, perception, and decision-making. Inke Intelligent adopts a Model-based control method, along with an MPC+WBC algorithm framework, incorporating modules like localization, gait planning, and ground contact calculation to implement torque hybrid control for biped robots.
Inke Intelligent revealed to AI Robotic Service Website that they plan to open-source the core control code of the EC-Hunter80-V01 robot, including underlying etherCAT communication, bipedal motion control algorithms, gait planning, and debugging components, while also open-sourcing the entire machine structure and utilized hardware modules.
This implies that users can modify and improve the robot's structure based on this open-source robot, such as increasing the robot's degrees of freedom, adding toe joints to the feet, adding appearance components, etc. Because this robot's load reaches 15kg, it can support adding two arms, even four arms, and vision systems, etc.
On the software layer, users can also improve the robot's control algorithm code under the premise of open-source code, such as incorporating reinforcement learning algorithms, etc., to upgrade the stability control of the robot. Overall, there is considerable space for modification and a high degree of expandability.
In an interview, Inke Intelligent revealed that the algorithm for the robot is independently open-sourced, slated to be uploaded to GitHub before the Eve of the Chinese New Year (February 8th) 2024, with the specific address (https://github.com/bridgedp). The hardware platform will be sold separately, with an initial pricing estimation of around 180,000 RMB.
The Foundation of Open Source
The fact that such a high degree of open source can be achieved is primarily due to the self-development and production of foundational motion control components.
In a previous report by AI Robotic Service Website titled "Is a new opportunity in the humanoid robot parts market approaching? This company is leading the charge," attention was drawn to Inke Intelligent. While the company hasn't been operational for a long time, the team initially focused on developing joint modules for robots, with technology that is highly distinctive, featuring final products with large peak torque density and light weight. For example, a product named EC-A8112-P1-18 has a peak torque of 90Nm and weighs 840g, while another named EC-A4310-P2-36 has a peak torque of 36Nm and weighs only 377g.

On the EC-Hunter80-V01 open-source biped robot, we also see lightweight characteristics. Unlike humanoid robot bodies currently on the market weighing tens of kilograms, the EC-Hunter80-V01 body weighs just over a dozen kilograms, which significantly enhances development convenience and safety for humanoid robots and indirectly improves the robustness of motion control.
This is because the robot uses joints that are the two most competitive lightweight products currently from Inke Intelligent Technology, EC-A8112-P1-18 and EC-A4310-P2-36. The combination of these self-developed and self-produced joints not only simplifies the design structure of humanoid robots, reduces maintenance difficulty, but also minimizes cabling and saves time from integrating different products, greatly improving the overall stability of both hardware and software. In terms of performance, these two products have a peak torque density exceeding 100Nm/kg, providing powerful motion capability for biped humanoid robots.

According to information from AI Robotic Service Website, previously, Inke Intelligent's main focus was on module development and production, without engaging in humanoid robot research. However, in the process of serving new users, considerable effort was often needed to communicate with clients and demonstrate the performance of modules in biped robots. Therefore, creating a robot model undoubtedly saves a lot of time.
During the ecosystem development process, Inke Intelligent had the chance to encounter 【BridgeDP】, a partner focusing on robotic algorithms. This mutual cooperation quickly launched an ecosystem cooperation project, utilizing the strengths of both companies to rapidly develop this open-source biped robot to better serve clients.
BridgeDP is reportedly a startup composed of members with master's, doctoral, and bachelor's degrees from Southern University of Science and Technology, Beihang University, Huazhong University of Science and Technology, Tsinghua University, and other domestic and international universities. They are committed to developing humanoid and quadruped robot motion control technology and modular products. The team was formed six months ago and has achieved stable walking control for a humanoid biped robot from scratch within one month, thanks to their excellent R&D capabilities. Going forward, the team will invest in frontier areas like robot reinforcement learning and imitation learning, as well as the development of the humanoid robot "cerebellum" module.
In their collaboration, Inke Intelligent provides the robot hardware and foundational communication solutions, while BridgeDP develops the compatible control algorithms. Moving forward, Inke Intelligent will be responsible for respective section upgrades.
InInke Intelligent believes that this robot is merely a beginning, not an end. In the future, both companies will maintain collaboration to continuously update and iterate this open-source version of the robot. The development roadmap includes a 2.0 version of the robot where Inke Intelligent hopes to add dual arms based on version 1.0, and version 3.0 will include vision, considering making the robot around 1.7 meters tall, making the robot more akin to humans and allowing it to perform more demos, thus facilitating easier robotic research for developers.

Conclusion and Future
Previously, most open-source projects in the global robotics field were initiated abroad. As a rare Chinese open-source humanoid robot, EC-Hunter80-V01 not only showcases the significant advancement of the humanoid robotics industry ecosystem in China but also reflects China's spirit of sharing and deep communication in the humanoid robotics area to the world. It is believed that EC-Hunter80-V01, an open-source bipedal robot, will likely hasten the development process of the entire industry and facilitate the integration of global general-purpose humanoid robots into practical use.
"Global robot open source is inevitable. Like computer operating systems, which have both commercial and open-source systems, and mobile systems that also have open-source options, the future market for robots is so expansive that there will undoubtedly be open-source robots," said Zhu Zonghuang, CEO of Inke Intelligent. Meanwhile, the founder of BridgeDP, Shang Yangxing, stated, "The development of the robotic community relies on the power of open source. In the past, we have greatly benefited from the open-source community. We hope to continue contributing to the robotic community and work together with our peers to advance the development of general-purpose robotics in China and worldwide."