Industry Observations and Reflections on Humanoid Robots
The 7th WAIC
Introduction
A while ago, the 7th World Artificial Intelligence Conference (WAIC) was held in Shanghai. This year's event was of particularly high standard, even Premier Li Qiang attended. Many humanoid robot companies participated, and a special humanoid robot array was set up, featuring eighteen humanoid robots, collectively known as the 'Eighteen Arhats'.

We are usually based in Shenzhen, but for a month prior to this exhibition, our colleagues were on business trips in Shanghai, assisting clients in preparing for the event. Among the 18 companies this time, 5 purchased and used our control system. We are grateful for every client's trust! Although our own small booth was quite modest, enabling our clients' success is our greatest achievement.
Scarcity of Motion Control Talent in the Humanoid Robot Industry
On one hand, with the increasing popularity of embodied intelligence/humanoid robots, more companies and teams are entering the legged robot industry, but the growth rate of talent significantly lags behind the market demand.
On the other hand, since 2023, legged robot motion control technology has entered a new phase. After decades of ZMP and several years of MPC, the new paradigm is reinforcement learning.
In the legged motion control industry, talent is already scarce, and now with the dual factors of paradigm shift and surge in market demand, both leading research institutions and top robot companies find it difficult to recruit talent.
Anyone who has debugged new physical robots from scratch knows that debugging is an extremely painful process, especially in the absence of successful experience. Only those with strong mental fortitude can find the right direction amidst confusion, guided by a faint glimmer of light.
A friend from Tsinghua summarized it well: "Most Tsinghua students are not suited to debug robots because their lives have been too smooth."
Our Solution
Starting at the end of 2023, we leveraged our solid R&D capabilities to quickly complete the paradigm shift from MPC to reinforcement learning and developed a highly efficient adaptive system process through the rigorous testing of numerous clients. For mature hardware, algorithm adaptation can be completed in as little as three and a half days. So far, we have accumulated debugging experience with a dozen different legged robot hardware, a team with such extensive experience is hard to find a second one.
According to the current market, hiring an experienced, competent RL motion control lead requires at least 2 million to start, and complementing with support and reserve teams (to be competitive, a team of over 10 is needed) would cost nearly 10 million a year. Even with lesser configuration, it still requires 5 million.
And a company's robot models won't be too many, so once the algorithm team finishes a model, much of the time they may be idle, reducing the speed of experience accumulation and growth, which is also a waste of talent.
Instead of spending effort building a team, it's better to choose a third-party team like us. We can deliver a complete set of training, deployment plans, and source code, so there's no need to worry about technology being in others' hands.
This model demands a higher speed of innovation from our team, otherwise, we will have nothing to sell. But seen from another perspective, this is good for us because this pressure forces us to innovate at the fastest speed rather than resting on past achievements, which gradually leads to a loss of vitality.
Historical Patterns
The reason why there is almost no other team specializing in motion control algorithms like us in the domestic market is due to a lot of short-term temptations for teams with our level of technical strength, with ample opportunities to join a specific company, or even start one to gain short-term excess benefits. But the path we've chosen is extremely challenging, requiring us to face numerous doubts and challenges along the way, with no expectation of substantial short-term gains. So why do we believe this path can continue and succeed?
The book "Fire in the Valley" portrays the personal computer revolution in the U.S. during the 1980s, which is very similar to today's changes in the Chinese robot industry, except no one yet calls it a "revolution." Looking back at today, years later, you'll feel: Sparks just started to fly. From the personal computer history, we can learn some profound industrial patterns.
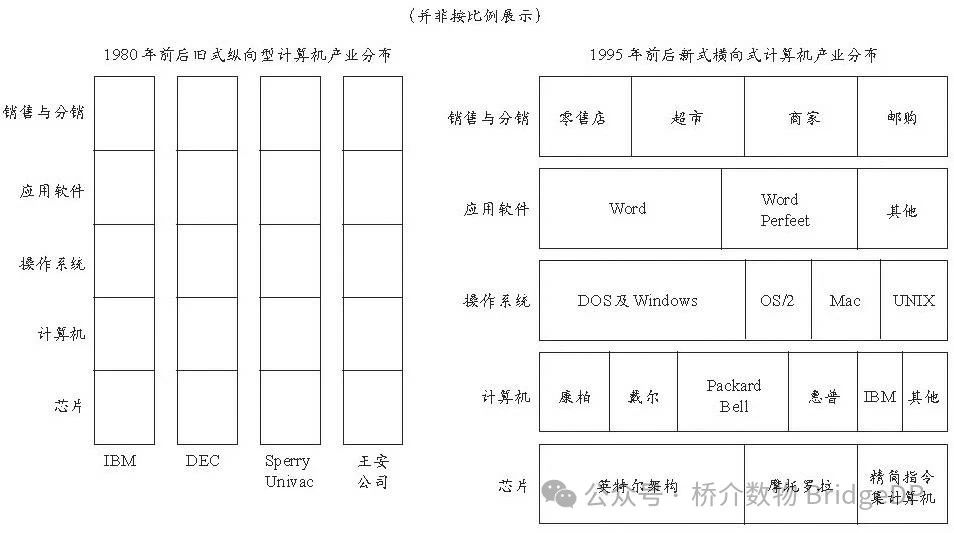
In an intensely competitive and vast market, if a startup wants to achieve first-rate standards in all aspects, it's not impossible, but indeed extremely difficult. The vertical integration representative in the personal computer industry is Apple, while the horizontal integration is Microsoft. Even as strong as Apple, by 1996, its market share had dropped to 4% from its peak of 16% in the late 1980s. It's fair to say that in the PC era, Apple lost to Microsoft.
Many people say Microsoft is inimitable, but industry patterns are hard to break. One of the founding figures of modern economics, Adam Smith, pointed out in his 1776 work "The Wealth of Nations": Specialization leads to improved efficiency, especially in a sufficiently free competitive market. Past industries like automobiles, personal computers, and mobiles were such markets, fully competitive and broad.
Intel's CEO Andy Grove also pointed out the importance of industry patterns through his personal experience in the book "Only the Paranoid Survive." If you can't adapt, you face elimination, even the blue giant IBM isn't invincible.
The endeavor of general-purpose robots isn't achieved overnight; it may not take ten years to establish a decent company, but to build a great one requires decades, we have enough time and patience to think and act in the long run.
Technical Outlook
We firmly believe in the efficiency of industrial specialization, this confidence not only stems from historical industry patterns but also from a profound technical pattern. This pattern also directs today's AI technology development.
Computer scientist Richard Sutton pointed out in "The Bitter Lesson" that AI researchers often incorporate human-known knowledge into algorithms, which is effective short-term, but in the long run, large-scale "search and learning" are what lead to breakthroughs. These patterns have been well validated in CV and NLP domains, initially by rule-based methods, then small-scale learning algorithms, and eventually general algorithms with large-scale learning. Future AI will see a decreased share of human knowledge in systems, with greater capabilities and generality.
Currently, legged motion control technology has developed to the second stage. Now training requires incorporating robot attributes expressed in urdf and other human knowledge, and models used are generally small, often targeting a single robot model. Much like NLP in the past, where models trained for one language, now general speech models are capable of cross-language usage. Future general controllers will also be cross-robot forms, which is the third phase's occurrence, and such a future is not far off.
Once such a general controller is developed, it will significantly impact the humanoid robot industry, lowering the threshold to assemble a humanoid robot greatly, and enhancing robot capabilities significantly. By then, more participants will flood into this industry, and control systems will no longer be a core focus, teams that can better integrate resources, define products, and sell will have an advantage, with the R&D technology accumulated by traditional robot companies being replaced and potentially rendered worthless.
And we are the most eager pursuers of this kind of general controller, and also the team most equipped for this research. We encounter the most hardware configurations, and control system development cannot be separated from hardware. Any specific company would find it challenging to develop controllers for other companies' hardware, lacking sufficient hardware configurations means lacking conditions and motivation for general controller development.
Therefore, considering ability and willingness from all angles, we are the most likely team to develop a general controller. If you also believe that general controllers will become a reality, please contact us (WeChat ID: bridgedp) to invest or join us.