为你的机器人快速构建一流运动能力——RoboCraft AI 内测开放申请
机型适配 动作定制 快速部署

我们一直在思考:机器人运动开发,能不能像剪视频、编辑文档一样简单?面对不同品牌、不同构型的人形机器人,行业能否存在统一、完整的开发工具链和部署流程,并为机器人构建持续进化的运动能力?
现实是,不管是本体厂商还是采购方,都面临着不同的行业难题。
对于硬件本体厂商而言,从0到1自研运动控制算法是一场成本高昂的硬仗。在传统模式下,运控开发是一个极度考验“复合能力”和“工程经验”的黑洞,它要求团队精通动力学控制、强化学习、仿真建模及 Sim2Real 真机部署等方面的知识。而动作的落地,又高度依赖专家团队实操经验和排查能力。这是一件重资产、长周期的事情,需要投入大量的人力和时间成本。
对于产业链下游的采购方而言,因为上游的生态封闭与割裂,为了让机器人在真实的场景当中满足用户的不同的诉求,需要拥有相应的二开能力,但过去这是一件强依赖经验的事情,需要工程能力和算法能力,对大多数机器人使用方并不友好。
现阶段,行业需要的不仅仅是单点算法的突破,而是统一、可复用、标准化的运动开发平台。
RoboCraft AI:
通用机器人运动能力开发平台
基于上述行业痛点,桥介数物推出 RoboCraft AI——通用机器人运动能力开发平台。
它凝聚了桥介数物在50多款不同品牌、构型机器人项目中的算法积累与 Sim2Real 工程经验,将专家级技术转化为统一、可复用的平台能力与标准化开发流程。
我们希望开发者借助这个平台,快速为机器人构建一流的运动能力。
以下为 RoboCraft AI 开发能力演示:
面对本体厂商与下游应用开发者的双重痛点,RoboCraft AI 从两个维度解决。
链路一:
自研本体 0→1 运控打通
面向自研本体研发企业,RoboCraft AI 提供快速、统一的接入流程,将过去大量依赖专家经验的环节逐步标准化:
URDF 建模合理性智能校验:机器人结构问题往往要到上真机时才会暴露,带来安全隐患。平台在 URDF 阶段即可提前发现并提示、修复问题。
硬件安全流程与检验机制:硬件非标准化问题普遍存在。桥介数物沉淀了多款机器人调试经验,转化为标准化的安全检查流程。
训练过程自动化调参:运动控制模型训练需针对不同动作、不同环境反复调参,成本极高。平台实现自动化调参,大幅减少人工介入。
完成接入后,自研本体可获得与成熟机型一致的基础运控能力与开发环境,显著缩短从硬件可用到可持续开发的周期。

内测支持范围:自研本体接入流程开放申请,具体机型与周期以审核评估为准。
链路二:
成熟机型动作编排与应用部署
面向已采购成熟机型的用户(租赁商、集成商、内容创作者、科研团队等),RoboCraft AI 提供开箱即用的动作开发工具链,无需重复接入与训练流程。
动作获取与编排
支持上传 MP4 视频提取动作、导入 BVH 动作文件;
可视化时间轴编排,低代码完成动作组合与商演流程配置;
内置动作资源库管理,支持团队内沉淀与复用。
多机部署与群控
机器人批量部署、应用一键下发
多机协同启动待命
团队协作与资产管理
动作资源、应用模板、机器人配置统一管理与共享;
成员开发的资产可一键入库,避免重复开发。
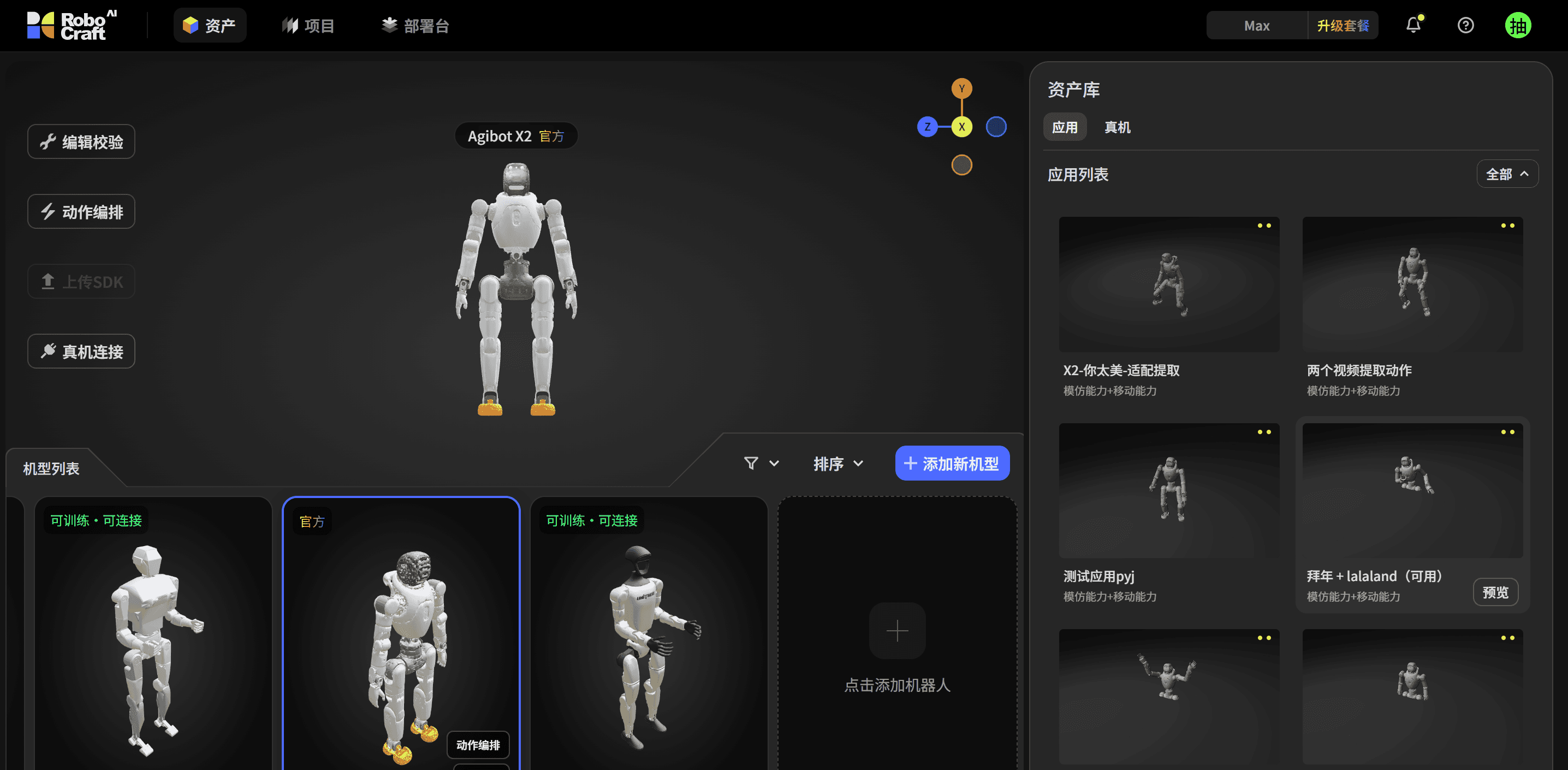
内测兼容机型:宇树 G1、智元 X2 ;更多品牌与机型持续扩展中。
内测申请正式开启
内测期间,我们将提供以下权益
可免费获取并部署宇树G1、智元X2等型号的多个热门舞蹈应用;
动作自由定制功能不限量使用。
我们特别欢迎以下群体申请内测
希望快速获得成熟运动能力的机器人本体研发企业;
希望快速部署机器人商演、文旅演艺、教育展示等应用的机器人租赁商、系统集成商;
希望开展机器人科研与教学的高校、科研机构;
希望探索机器人内容创作、动作开发和应用创新的新一代开发者。
扫码申请:

审核通过后,用户可自行注册登录和创建组织。我们也会邀请用户加入 RoboCraft AI 核心内测交流群,与桥介数物团队共同推动产品迭代。
我们一直在思考:机器人运动开发,能不能像剪视频、编辑文档一样简单?面对不同品牌、不同构型的人形机器人,行业能否存在统一、完整的开发工具链和部署流程,并为机器人构建持续进化的运动能力?
现实是,不管是本体厂商还是采购方,都面临着不同的行业难题。
对于硬件本体厂商而言,从0到1自研运动控制算法是一场成本高昂的硬仗。在传统模式下,运控开发是一个极度考验“复合能力”和“工程经验”的黑洞,它要求团队精通动力学控制、强化学习、仿真建模及 Sim2Real 真机部署等方面的知识。而动作的落地,又高度依赖专家团队实操经验和排查能力。这是一件重资产、长周期的事情,需要投入大量的人力和时间成本。
对于产业链下游的采购方而言,因为上游的生态封闭与割裂,为了让机器人在真实的场景当中满足用户的不同的诉求,需要拥有相应的二开能力,但过去这是一件强依赖经验的事情,需要工程能力和算法能力,对大多数机器人使用方并不友好。
现阶段,行业需要的不仅仅是单点算法的突破,而是统一、可复用、标准化的运动开发平台。
RoboCraft AI:
通用机器人运动能力开发平台
基于上述行业痛点,桥介数物推出 RoboCraft AI——通用机器人运动能力开发平台。
它凝聚了桥介数物在50多款不同品牌、构型机器人项目中的算法积累与 Sim2Real 工程经验,将专家级技术转化为统一、可复用的平台能力与标准化开发流程。
我们希望开发者借助这个平台,快速为机器人构建一流的运动能力。
以下为 RoboCraft AI 开发能力演示:
面对本体厂商与下游应用开发者的双重痛点,RoboCraft AI 从两个维度解决。
链路一:
自研本体 0→1 运控打通
面向自研本体研发企业,RoboCraft AI 提供快速、统一的接入流程,将过去大量依赖专家经验的环节逐步标准化:
URDF 建模合理性智能校验:机器人结构问题往往要到上真机时才会暴露,带来安全隐患。平台在 URDF 阶段即可提前发现并提示、修复问题。
硬件安全流程与检验机制:硬件非标准化问题普遍存在。桥介数物沉淀了多款机器人调试经验,转化为标准化的安全检查流程。
训练过程自动化调参:运动控制模型训练需针对不同动作、不同环境反复调参,成本极高。平台实现自动化调参,大幅减少人工介入。
完成接入后,自研本体可获得与成熟机型一致的基础运控能力与开发环境,显著缩短从硬件可用到可持续开发的周期。
内测支持范围:自研本体接入流程开放申请,具体机型与周期以审核评估为准。
链路二:
成熟机型动作编排与应用部署
面向已采购成熟机型的用户(租赁商、集成商、内容创作者、科研团队等),RoboCraft AI 提供开箱即用的动作开发工具链,无需重复接入与训练流程。
动作获取与编排
支持上传 MP4 视频提取动作、导入 BVH 动作文件;
可视化时间轴编排,低代码完成动作组合与商演流程配置;
内置动作资源库管理,支持团队内沉淀与复用。
多机部署与群控
机器人批量部署、应用一键下发
多机协同启动待命
团队协作与资产管理
动作资源、应用模板、机器人配置统一管理与共享;
成员开发的资产可一键入库,避免重复开发。
内测兼容机型:宇树 G1、智元 X2 ;更多品牌与机型持续扩展中。
内测申请正式开启
内测期间,我们将提供以下权益
可免费获取并部署宇树G1、智元X2等型号的多个热门舞蹈应用;
动作自由定制功能不限量使用。
我们特别欢迎以下群体申请内测
希望快速获得成熟运动能力的机器人本体研发企业;
希望快速部署机器人商演、文旅演艺、教育展示等应用的机器人租赁商、系统集成商;
希望开展机器人科研与教学的高校、科研机构;
希望探索机器人内容创作、动作开发和应用创新的新一代开发者。
扫码申请:
审核通过后,用户可自行注册登录和创建组织。我们也会邀请用户加入 RoboCraft AI 核心内测交流群,与桥介数物团队共同推动产品迭代。