ブリッジインターフェース番号が2025ロボット大会に登場
三大コア技術
はじめに
2025年8月8日から12日まで、世界ロボット会議が北京の北人亦創国際会展センターで開催されます。国内の総合ロボット「小脳」(運動制御システム)開発メーカーとして、橋介数物は三つの技術成果を展示し、その「精密、柔軟、高効率」の最先端ソリューションは、総合ロボットの運動制御に新たなエネルギーを注入するだけでなく、業界の標準化およびスケール化発展に重要な支えを提供し、工業生産、自動車製造、家庭サービス等の分野から広く関心を集めています。
今回の展示会では、橋介数物の創設者である尚陽星が、初めて一般公開される総合ロボットの動作開発プラットフォームをデモンストレーションしました。特筆すべきは、会場で16社のロボットメーカーが橋介数物の運動制御ソリューションを利用し、その技術が業界内での認知度と適用範囲を十分に示したことです。

橋介数物の創設者尚陽星が総合ロボットの動作開発プラットフォームをデモンストレーション
展示会の期間中、深圳市南山区の区委員書記である黄湘岳が橋介数物のブースを訪れ、指導を行い、総合ロボットの運動制御分野における会社の革新的成果とソリューションを深く理解しました。

核心技術一:全方向移動運控ソリューション——ロボットに運動能力を持たせる
橋介数物が開発した全方向移動運控ソリューションは、革新的なアルゴリズムアーキテクチャによって「リアルさ」と「ロバスト性」のバランスを実現しました。このソリューションは、人型、四足、車輪足など異なる構造のロボットに適応でき、多様な運動スタイルを学習し、前進、後退、左右の平行移動、原地回転、歩行、走行などの基本動作だけでなく、階段を上り下りするなどの複雑なシーン操作も可能です。最適化された判別器と戦略アルゴリズムにより、ロボットの動きが人間や動物の自然な状態に近づくとともに、強い干渉耐性も備えています。
従来の制御ソリューションと比較して、このソリューションは報酬関数を精密に設計する必要がなく、対戦学習によって機械が自律的に省力かつ安定した運動パターンを習得できます。これにより、アルゴリズムの開発難易度を大幅に低下させることができます。
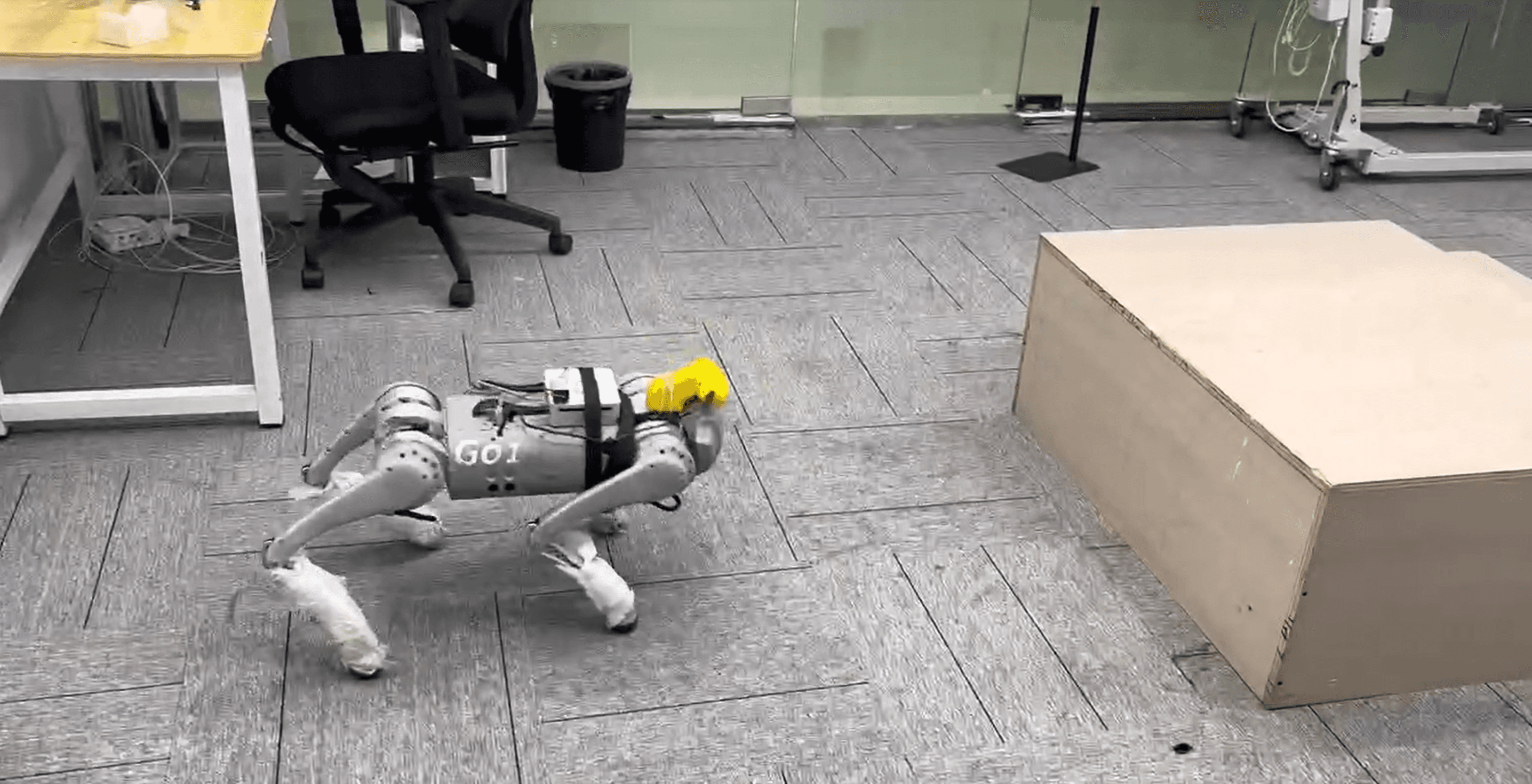
四足のロボット犬がセンサーを使って障害物を越える
核心技術二:全身模倣運控ソリューション——人間の複雑な動作を高精度で再現
橋介数物がDeepmimicアルゴリズムに基づいて開発した全身模倣運動制御ソリューションは、「模倣学習+強化学習」の二段階のアプローチを採用することで、人型ロボットが人間の複雑な動作を高精度で移転することを可能にし、ダンスや武道などの複雑な動作のサポートやカスタム動作にも対応しています。
この技術の核心論理は、まずモーションキャプチャ機器を使って人間の運動シーンを取得し、次に模倣学習によってロボットが基礎動作のフレームを「レプリカ」することです。その後、強化学習によって物理的可行性を最適化し、ロボットのハードウェア上での動作の安定性とスムーズさを確保します。
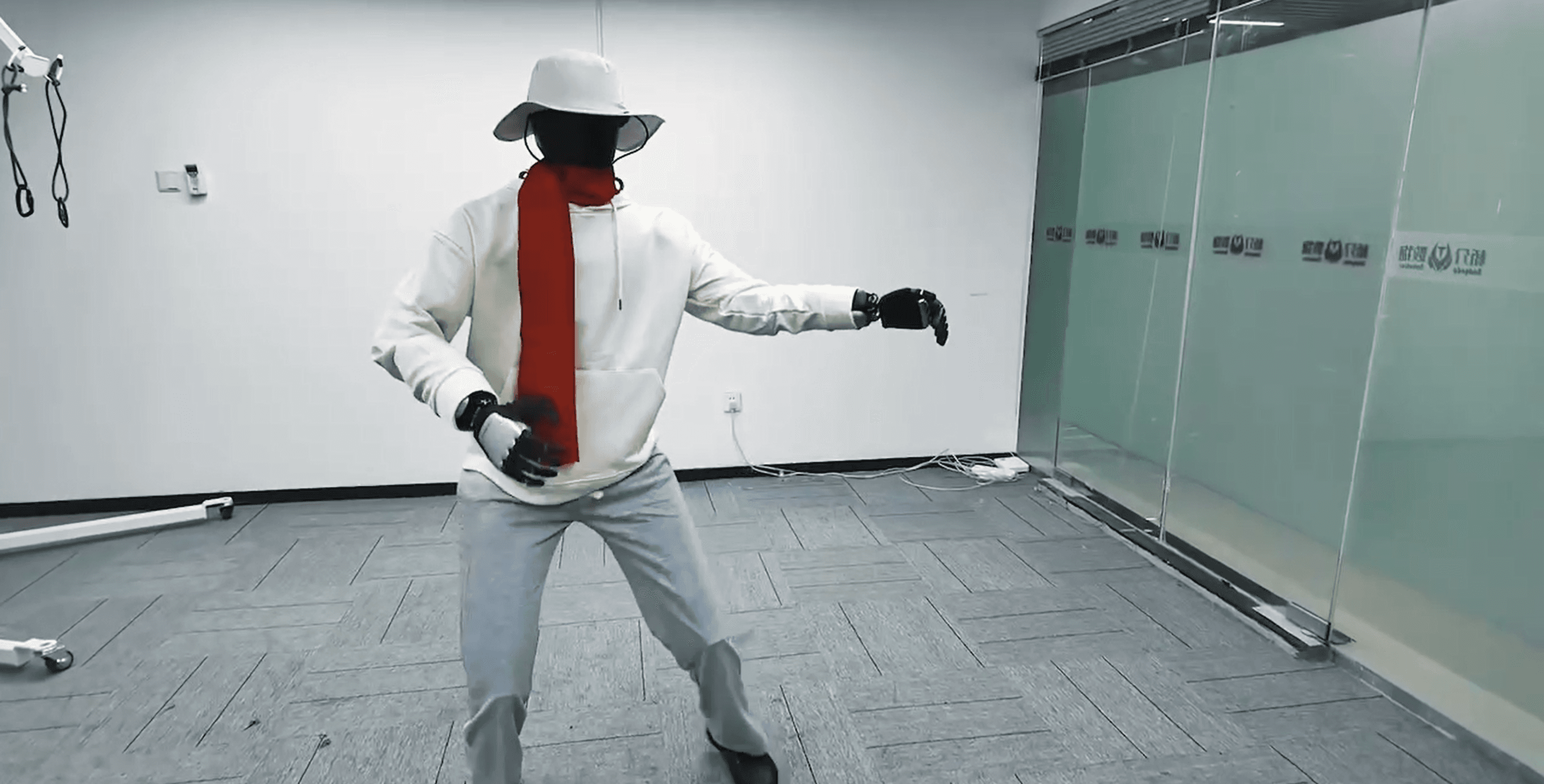
人型ロボット全身運動制御
核心技術三:総合ロボットの動作開発プラットフォーム——動作開発のハードルを下げる
橋介数物の創設者尚陽星は、初めて外部に向けて総合ロボットの動作開発プラットフォームをデモンストレーションしました。このプラットフォームは、橋介数物の技術経験の核心製品であり、すでに社内で使用されており、正式に市場に投入される準備が整っています。プラットフォームは、過去の人力で顧客の運動問題を完全に解決する際に蓄積された豊富な経験と業界認識に基づき、大規模な動作データセット、データ前処理ツール、モデル訓練の自動化、デプロイメントテストの自動化、実物の継続的な運用および保守などの機能モジュールを統合しており、動作開発の技術的ハードルを大幅に下げ、ロボットの運動制御の開発効率を向上させ、総合ロボットが多様なシーンに素早く適応し、スケールアップされたアプリケーションを実現するために重要な支えを提供します。開発者はローコード操作を通じて動作生成とデバッグを簡単に行うことができ、ロボットの開発アイデアを存分に発揮することができます。
技術の背後に:『学術実験室』から『産業の実現』へのハードコアチーム
橋介数物は2023年5月に設立され、核心技術チームの平均年齢はわずか26歳であり、華中科技大学、南方科技大学、カーネギーメロン大学、北京航空航天大学など国内外のトップ校からロボット分野の人材を集めています。創設者の尚陽星は学部課程からロボット開発に特化し、彼が率いるチームは『学術+エンジニアリング+ビジネス』の全体的能力を駆使して、わずか2年で技術の突破から産業の実現までの飛躍を達成しました。
会社は「第三者の運動制御市場の空白を埋める」ことを目標に、業界の三大課題に挑んでいます:物理的移転の難しさ、開発効率の低さ、ソフトウェアの汎用性の低さです。Sim2realトレーニング、強化学習、深層模倣などの技術を活用して、ニーズに応じた基本運動制御モジュールを呼び出し、開発コストを削減し、開発効率を向上させて、最短3日で一つの動作開発を完了することができ、ロボットの動作精度を92%に引き上げることができ、成功率は80%に達し、国内でも数少ない総合型運動制御ソリューションを提供する企業となりました。2025年第2四半期までに、その運動制御ソリューションは40社以上のロボットメーカーに展開されています。
橋介数物の最終目標は、ロボットの運動制御を極めて簡単かつ便利にすることです。そのため、橋介数物は総合ロボット運動制御プラットフォームの技術開発とアルゴリズムの繰り返し改良に取り組み、顧客の動作開発のニーズに応えています。また、未来に対する見通しに基づき、橋介数物のビジネスモデルはプロジェクトベースの納品から、ライセンス+サービス料金+サブスクリプションモデルへの転換を試みています。橋介数物は、ロボットの運動制御技術が一般的、高効率、普及することを望んでおり、ロボットが多くの業界に進出することが遠い想像ではなくなることを期待しています。

はじめに
2025年8月8日から12日まで、世界ロボット会議が北京の北人亦創国際会展センターで開催されます。国内の総合ロボット「小脳」(運動制御システム)開発メーカーとして、橋介数物は三つの技術成果を展示し、その「精密、柔軟、高効率」の最先端ソリューションは、総合ロボットの運動制御に新たなエネルギーを注入するだけでなく、業界の標準化およびスケール化発展に重要な支えを提供し、工業生産、自動車製造、家庭サービス等の分野から広く関心を集めています。
今回の展示会では、橋介数物の創設者である尚陽星が、初めて一般公開される総合ロボットの動作開発プラットフォームをデモンストレーションしました。特筆すべきは、会場で16社のロボットメーカーが橋介数物の運動制御ソリューションを利用し、その技術が業界内での認知度と適用範囲を十分に示したことです。
橋介数物の創設者尚陽星が総合ロボットの動作開発プラットフォームをデモンストレーション
展示会の期間中、深圳市南山区の区委員書記である黄湘岳が橋介数物のブースを訪れ、指導を行い、総合ロボットの運動制御分野における会社の革新的成果とソリューションを深く理解しました。
核心技術一:全方向移動運控ソリューション——ロボットに運動能力を持たせる
橋介数物が開発した全方向移動運控ソリューションは、革新的なアルゴリズムアーキテクチャによって「リアルさ」と「ロバスト性」のバランスを実現しました。このソリューションは、人型、四足、車輪足など異なる構造のロボットに適応でき、多様な運動スタイルを学習し、前進、後退、左右の平行移動、原地回転、歩行、走行などの基本動作だけでなく、階段を上り下りするなどの複雑なシーン操作も可能です。最適化された判別器と戦略アルゴリズムにより、ロボットの動きが人間や動物の自然な状態に近づくとともに、強い干渉耐性も備えています。
従来の制御ソリューションと比較して、このソリューションは報酬関数を精密に設計する必要がなく、対戦学習によって機械が自律的に省力かつ安定した運動パターンを習得できます。これにより、アルゴリズムの開発難易度を大幅に低下させることができます。
四足のロボット犬がセンサーを使って障害物を越える
核心技術二:全身模倣運控ソリューション——人間の複雑な動作を高精度で再現
橋介数物がDeepmimicアルゴリズムに基づいて開発した全身模倣運動制御ソリューションは、「模倣学習+強化学習」の二段階のアプローチを採用することで、人型ロボットが人間の複雑な動作を高精度で移転することを可能にし、ダンスや武道などの複雑な動作のサポートやカスタム動作にも対応しています。
この技術の核心論理は、まずモーションキャプチャ機器を使って人間の運動シーンを取得し、次に模倣学習によってロボットが基礎動作のフレームを「レプリカ」することです。その後、強化学習によって物理的可行性を最適化し、ロボットのハードウェア上での動作の安定性とスムーズさを確保します。
人型ロボット全身運動制御
核心技術三:総合ロボットの動作開発プラットフォーム——動作開発のハードルを下げる
橋介数物の創設者尚陽星は、初めて外部に向けて総合ロボットの動作開発プラットフォームをデモンストレーションしました。このプラットフォームは、橋介数物の技術経験の核心製品であり、すでに社内で使用されており、正式に市場に投入される準備が整っています。プラットフォームは、過去の人力で顧客の運動問題を完全に解決する際に蓄積された豊富な経験と業界認識に基づき、大規模な動作データセット、データ前処理ツール、モデル訓練の自動化、デプロイメントテストの自動化、実物の継続的な運用および保守などの機能モジュールを統合しており、動作開発の技術的ハードルを大幅に下げ、ロボットの運動制御の開発効率を向上させ、総合ロボットが多様なシーンに素早く適応し、スケールアップされたアプリケーションを実現するために重要な支えを提供します。開発者はローコード操作を通じて動作生成とデバッグを簡単に行うことができ、ロボットの開発アイデアを存分に発揮することができます。
技術の背後に:『学術実験室』から『産業の実現』へのハードコアチーム
橋介数物は2023年5月に設立され、核心技術チームの平均年齢はわずか26歳であり、華中科技大学、南方科技大学、カーネギーメロン大学、北京航空航天大学など国内外のトップ校からロボット分野の人材を集めています。創設者の尚陽星は学部課程からロボット開発に特化し、彼が率いるチームは『学術+エンジニアリング+ビジネス』の全体的能力を駆使して、わずか2年で技術の突破から産業の実現までの飛躍を達成しました。
会社は「第三者の運動制御市場の空白を埋める」ことを目標に、業界の三大課題に挑んでいます:物理的移転の難しさ、開発効率の低さ、ソフトウェアの汎用性の低さです。Sim2realトレーニング、強化学習、深層模倣などの技術を活用して、ニーズに応じた基本運動制御モジュールを呼び出し、開発コストを削減し、開発効率を向上させて、最短3日で一つの動作開発を完了することができ、ロボットの動作精度を92%に引き上げることができ、成功率は80%に達し、国内でも数少ない総合型運動制御ソリューションを提供する企業となりました。2025年第2四半期までに、その運動制御ソリューションは40社以上のロボットメーカーに展開されています。
橋介数物の最終目標は、ロボットの運動制御を極めて簡単かつ便利にすることです。そのため、橋介数物は総合ロボット運動制御プラットフォームの技術開発とアルゴリズムの繰り返し改良に取り組み、顧客の動作開発のニーズに応えています。また、未来に対する見通しに基づき、橋介数物のビジネスモデルはプロジェクトベースの納品から、ライセンス+サービス料金+サブスクリプションモデルへの転換を試みています。橋介数物は、ロボットの運動制御技術が一般的、高効率、普及することを望んでおり、ロボットが多くの業界に進出することが遠い想像ではなくなることを期待しています。
著作権 © 2023 – 2026 橋介数物(深圳)科技有限公司 版权所有
© 橋介数物|汎用ロボットオペレーティングシステム開発元
著作権 © 2023 – 2026 橋介数物(深圳)科技有限公司 版权所有
© 橋介数物|汎用ロボットオペレーティングシステム開発元
著作権 © 2023 – 2026 橋介数物(深圳)科技有限公司 版权所有
© 橋介数物|汎用ロボットオペレーティングシステム開発元