ロボットにトップクラスの運動能力を素早く構築——RoboCraft AI クローズドβテストの申請受付開始
動作カスタマイズ

私たちは常に考え続けてきました。ロボットの運動開発は、動画編集やドキュメント作成と同じようにシンプルにできないだろうか?異なるブランドや異なる構成の人型ロボットに対して、業界全体で統一された完全な開発ツールチェーンとデプロイプロセスが存在し、ロボットに継続的に進化する運動能力を構築することはできないだろうか?
現実には、ハードウェアメーカーであれ購入者であれ、それぞれ異なる業界の課題に直面しています。
ハードウェアメーカーにとって、0から1への運動制御アルゴリズムの自主開発は、コストのかかる過酷な戦いです。従来の開発パターンでは、運動制御開発は「複合的な能力」と「エンジニアリング経験」が極めて問われるブラックホールのようなものであり、チームに対して動力学制御、強化学習、シミュレーションモデリング、およびSim2Real実機デプロイなどの専門知識を高いレベルで要求します。そして、動作の実現は、専門家チームの実践経験やトラブルシューティング能力に大きく依存しています。これは、多大な資本と長いサイクルを必要とし、膨大な人件費と時間コストを投入しなければならないものです。
産業チェーンの下流に位置する購入者にとっては、上流のエコシステムが閉鎖的かつ分断されているため、実際のシナリオでロボットがユーザーの多様な要望に応えられるようにするには、相応の二次開発能力が必要となります。しかし、これまでは経験に強く依存する領域であり、エンジニアリング能力とアルゴリズム能力が要求され、大部分のロボットユーザーにとっては決して扱いやすいものではありませんでした。
現段階で業界が必要としているのは、単なる単一のアルゴリズムの突破口ではなく、統一され、再利用可能で、標準化された運動開発プラットフォームです。
RoboCraft AI:
汎用ロボット運動能力開発プラットフォーム
このような業界の課題を解決するため、BridgeMind(橋介数物)は「RoboCraft AI」——汎用ロボット運動能力開発プラットフォームを立ち上げました。
本プラットフォームは、BridgeMindが50機種以上の異なるブランドや構成のロボットプロジェクトで蓄積してきたアルゴリズムとSim2Realのエンジニアリング経験を結集し、専門家レベルの技術を、統一され再利用可能なプラットフォーム能力と標準化された開発プロセスへと変換したものです。
開発者の皆様が、このプラットフォームを活用してロボットの一流の運動能力を迅速に構築できることを目指しています。
以下は、RoboCraft AIの開発能力のデモンストレーションです:
ロボットメーカーと下流アプリケーション開発者の両者の課題に対し、RoboCraft AIは2つのアプローチから解決策を提供します。
アプローチ1:
自社ハードウェア 0→1の運制限御の疎通
自社製ロボットを開発する企業に向けて、RoboCraft AIは迅速かつ統一された導入プロセスを提供し、これまで専門家の経験に依存していた多くのプロセスを段階的に標準化します:
URDFモデリングの妥当性スマートチェック:ロボットの構造的な問題は、実機に適用されるまで表面化しないことが多く、安全上のリスクとなります。プラットフォームは、URDFの段階で問題を事前に発見し、提示・修正することができます。
ハードウェア安全プロセスと検証メカニズム:ハードウェアの非標準化問題は広く存在します。BridgeMindがこれまでに蓄積した複数のロボット調整の経験を、標準化された安全検査プロセスへと変換しました。
トレーニングプロセスの自動パラメータ調整:運動制御モデルのトレーニングは、異なる動作や環境に合わせて繰り返しパラメータを調整する必要があり、極めて高コストです。本プラットフォームはパラメータ調整を自動化し、手動による介入を大幅に削減します。
導入完了後、独自に開発したロボットは、実績のある機種と同じ基本の運動制御能力と開発環境を獲得でき、ハードウェアが利用可能になってから持続的な開発サイクルに入るまでの期間を大幅に短縮できます。

クローズドベータ対応範囲:独自開発ロボットの導入プロセスの申請受付を開始しました。具体的な機種および導入期間は、審査の評価に基づきます。
アプローチ2:
実用化機種の動作作成とアプリ展開
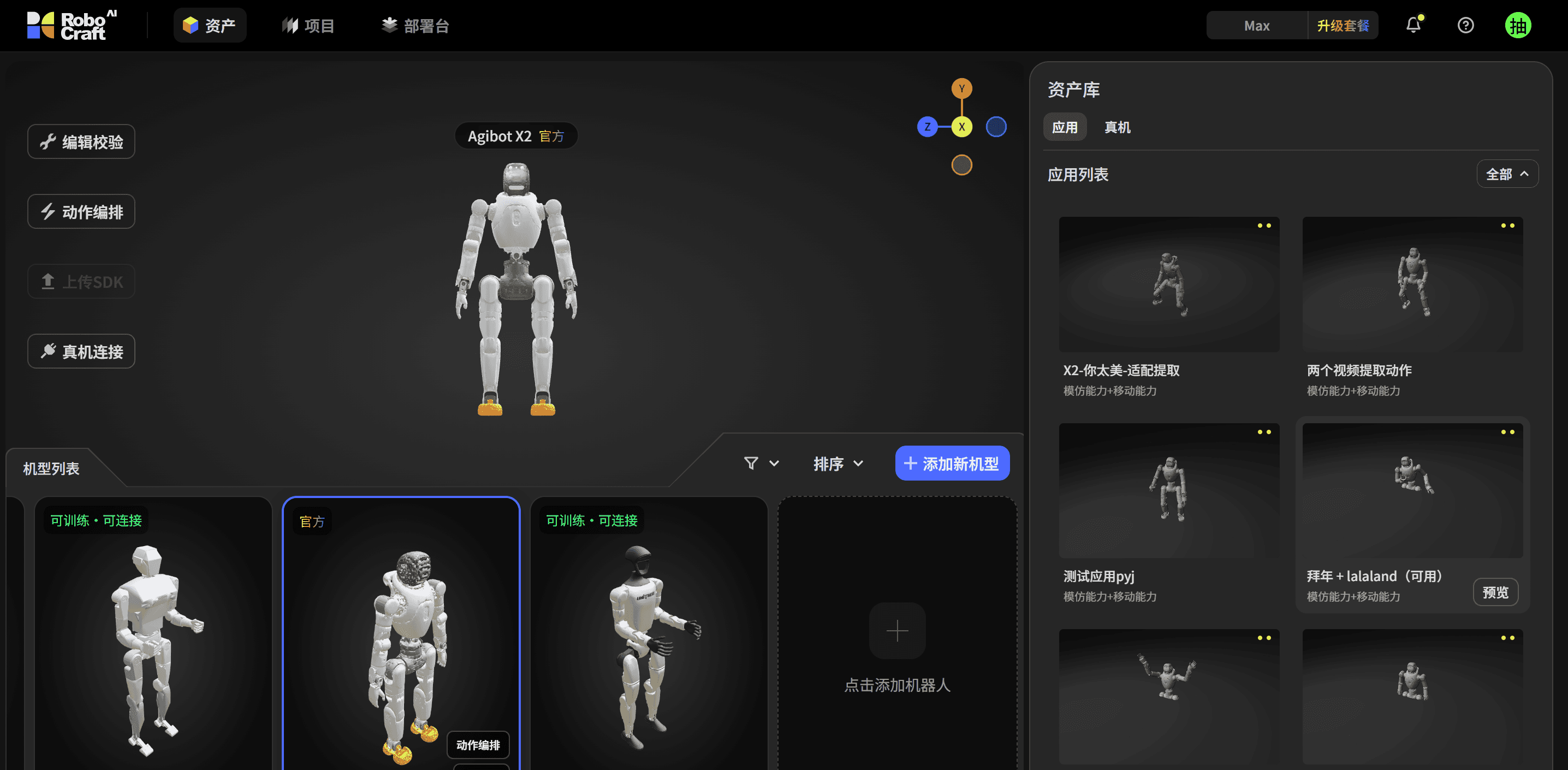
すでに実用化されている機種を購入済みのユーザー(レンタル事業者、インテグレーター、コンテンツクリエイター、研究チームなど)に向けて、RoboCraft AIは、導入やトレーニングプロセスを繰り返すことなく、すぐに使える動作開発ツールチェーンを提供します。
動作の取得と作成(編集)
MP4動画をアップロードしての動作抽出や、BVH動作ファイルのインポートに対応;
視覚的なタイムライン編集により、ローコードで動作の組み合わせや商業パフォーマンスのプロセス設定を完了;
内蔵の動作リソースライブラリ管理により、チーム内での蓄積と再利用をサポート。
複数台への展開と一括制御
ロボットの一括デプロイ、アプリケーションの一括配信
複数台の協調起動と待機命令
チームコラボレーションとアセット管理
動作リソース、アプリケーションテンプレート、ロボット構成の統一的な管理と共有;
メンバーが開発したアセットをワンクリックでライブラリに保存でき、重複開発を回避。
クローズドベータ互換機種:Unitree G1、Agibot X2。さらに多くのブランドや機種を順次拡大中です。
クローズドベータテスト申請 正式開始
ベータテスト期間中、以下の特典を提供いたします
Unitree G1、Agibot X2などのモデルに対応する、複数の人気ダンスアプリを無料で入手およびデプロイ可能;
動作の自由なカスタマイズ機能を無制限に利用可能。
特に以下のような方々のクローズドベータ参加を心より歓迎いたします
実績のある運動能力を迅速に獲得したいロボットハードウェア開発企業;
ロボットの商業公演、文化観光エンターテインメント、教育展示などのアプリケーションを迅速に展開したいロボットレンタル事業者やシステムインテグレーター;
ロボットの科学研究や教育活動を展開したい大学および研究機関;
ロボットのコンテンツ制作、動作開発、アプリケーションの革新を模索したい新世代の開発者。
QRコードから申請:

審査を通過した後、ユーザーは自身で登録、ログインし、組織を作成することができます。また、ユーザーをRoboCraft AIコアベータ交流グループへご招待し、BridgeMindチームと共に製品のバージョンアップを共に推進していただきます。
私たちは常に考え続けてきました。ロボットの運動開発は、動画編集やドキュメント作成と同じようにシンプルにできないだろうか?異なるブランドや異なる構成の人型ロボットに対して、業界全体で統一された完全な開発ツールチェーンとデプロイプロセスが存在し、ロボットに継続的に進化する運動能力を構築することはできないだろうか?
現実には、ハードウェアメーカーであれ購入者であれ、それぞれ異なる業界の課題に直面しています。
ハードウェアメーカーにとって、0から1への運動制御アルゴリズムの自主開発は、コストのかかる過酷な戦いです。従来の開発パターンでは、運動制御開発は「複合的な能力」と「エンジニアリング経験」が極めて問われるブラックホールのようなものであり、チームに対して動力学制御、強化学習、シミュレーションモデリング、およびSim2Real実機デプロイなどの専門知識を高いレベルで要求します。そして、動作の実現は、専門家チームの実践経験やトラブルシューティング能力に大きく依存しています。これは、多大な資本と長いサイクルを必要とし、膨大な人件費と時間コストを投入しなければならないものです。
産業チェーンの下流に位置する購入者にとっては、上流のエコシステムが閉鎖的かつ分断されているため、実際のシナリオでロボットがユーザーの多様な要望に応えられるようにするには、相応の二次開発能力が必要となります。しかし、これまでは経験に強く依存する領域であり、エンジニアリング能力とアルゴリズム能力が要求され、大部分のロボットユーザーにとっては決して扱いやすいものではありませんでした。
現段階で業界が必要としているのは、単なる単一のアルゴリズムの突破口ではなく、統一され、再利用可能で、標準化された運動開発プラットフォームです。
RoboCraft AI:
汎用ロボット運動能力開発プラットフォーム
このような業界の課題を解決するため、BridgeMind(橋介数物)は「RoboCraft AI」——汎用ロボット運動能力開発プラットフォームを立ち上げました。
本プラットフォームは、BridgeMindが50機種以上の異なるブランドや構成のロボットプロジェクトで蓄積してきたアルゴリズムとSim2Realのエンジニアリング経験を結集し、専門家レベルの技術を、統一され再利用可能なプラットフォーム能力と標準化された開発プロセスへと変換したものです。
開発者の皆様が、このプラットフォームを活用してロボットの一流の運動能力を迅速に構築できることを目指しています。
以下は、RoboCraft AIの開発能力のデモンストレーションです:
ロボットメーカーと下流アプリケーション開発者の両者の課題に対し、RoboCraft AIは2つのアプローチから解決策を提供します。
アプローチ1:
自社ハードウェア 0→1の運制限御の疎通
自社製ロボットを開発する企業に向けて、RoboCraft AIは迅速かつ統一された導入プロセスを提供し、これまで専門家の経験に依存していた多くのプロセスを段階的に標準化します:
URDFモデリングの妥当性スマートチェック:ロボットの構造的な問題は、実機に適用されるまで表面化しないことが多く、安全上のリスクとなります。プラットフォームは、URDFの段階で問題を事前に発見し、提示・修正することができます。
ハードウェア安全プロセスと検証メカニズム:ハードウェアの非標準化問題は広く存在します。BridgeMindがこれまでに蓄積した複数のロボット調整の経験を、標準化された安全検査プロセスへと変換しました。
トレーニングプロセスの自動パラメータ調整:運動制御モデルのトレーニングは、異なる動作や環境に合わせて繰り返しパラメータを調整する必要があり、極めて高コストです。本プラットフォームはパラメータ調整を自動化し、手動による介入を大幅に削減します。
導入完了後、独自に開発したロボットは、実績のある機種と同じ基本の運動制御能力と開発環境を獲得でき、ハードウェアが利用可能になってから持続的な開発サイクルに入るまでの期間を大幅に短縮できます。
クローズドベータ対応範囲:独自開発ロボットの導入プロセスの申請受付を開始しました。具体的な機種および導入期間は、審査の評価に基づきます。
アプローチ2:
実用化機種の動作作成とアプリ展開
すでに実用化されている機種を購入済みのユーザー(レンタル事業者、インテグレーター、コンテンツクリエイター、研究チームなど)に向けて、RoboCraft AIは、導入やトレーニングプロセスを繰り返すことなく、すぐに使える動作開発ツールチェーンを提供します。
動作の取得と作成(編集)
MP4動画をアップロードしての動作抽出や、BVH動作ファイルのインポートに対応;
視覚的なタイムライン編集により、ローコードで動作の組み合わせや商業パフォーマンスのプロセス設定を完了;
内蔵の動作リソースライブラリ管理により、チーム内での蓄積と再利用をサポート。
複数台への展開と一括制御
ロボットの一括デプロイ、アプリケーションの一括配信
複数台の協調起動と待機命令
チームコラボレーションとアセット管理
動作リソース、アプリケーションテンプレート、ロボット構成の統一的な管理と共有;
メンバーが開発したアセットをワンクリックでライブラリに保存でき、重複開発を回避。
クローズドベータ互換機種:Unitree G1、Agibot X2。さらに多くのブランドや機種を順次拡大中です。
クローズドベータテスト申請 正式開始
ベータテスト期間中、以下の特典を提供いたします
Unitree G1、Agibot X2などのモデルに対応する、複数の人気ダンスアプリを無料で入手およびデプロイ可能;
動作の自由なカスタマイズ機能を無制限に利用可能。
特に以下のような方々のクローズドベータ参加を心より歓迎いたします
実績のある運動能力を迅速に獲得したいロボットハードウェア開発企業;
ロボットの商業公演、文化観光エンターテインメント、教育展示などのアプリケーションを迅速に展開したいロボットレンタル事業者やシステムインテグレーター;
ロボットの科学研究や教育活動を展開したい大学および研究機関;
ロボットのコンテンツ制作、動作開発、アプリケーションの革新を模索したい新世代の開発者。
QRコードから申請:
審査を通過した後、ユーザーは自身で登録、ログインし、組織を作成することができます。また、ユーザーをRoboCraft AIコアベータ交流グループへご招待し、BridgeMindチームと共に製品のバージョンアップを共に推進していただきます。
著作権 © 2023 – 2026 橋介数物(深圳)科技有限公司 版权所有
© 橋介数物|汎用ロボットオペレーティングシステム開発元
著作権 © 2023 – 2026 橋介数物(深圳)科技有限公司 版权所有
© 橋介数物|汎用ロボットオペレーティングシステム開発元
著作権 © 2023 – 2026 橋介数物(深圳)科技有限公司 版权所有
© 橋介数物|汎用ロボットオペレーティングシステム開発元