BridgeDP debuts at the 2025 Robotics Conference
Three technologies
Introduction
From August 8th to 12th, the 2025 World Robot Conference was held at the Beijing Etrong International Exhibition & Convention Center. As a leading domestic developer of general-purpose robot locomotion (motion control system), BridgeDP showcased three major technological achievements at the exhibition. Its "precise, flexible, and efficient" cutting-edge solutions not only inject new energy into general-purpose robot motion control but also provide critical support for standardized and scaled development in the industry, attracting widespread attention from fields such as industrial production, automotive manufacturing, and home services.
At this exhibition, BridgeDP founder Shang Yangxing publicly demonstrated the upcoming general-purpose robot motion development platform for the first time. Notably, 16 robot manufacturers used BridgeDP's motion control solutions on-site, fully showcasing its recognition and application breadth within the industry.

BridgeDP founder Shang Yangxing demonstrating the general-purpose robot motion development platform
During the exhibition, Huang Xiangyue, Secretary of Nanshan District, Shenzhen, visited the BridgeDP booth for guidance and took a deep dive into the company's innovative achievements and solutions in the field of general-purpose robot motion control.

Core Technology One: Omni-directional Locomotion Control Solution—Endowing Robots with Mobility
The omni-directional locomotion control solution developed by BridgeDP achieves a balance between "realism" and "robustness" through an innovative algorithm architecture. This solution can be adapted to different robot configurations, such as humanoid, quadruped, and wheeled-legged robots, learning various motion styles. It not only supports basic actions like moving forward, backward, side-stepping, in-place rotation, walking, and running but also enables complex scenarios like climbing stairs with perception. By optimizing the discriminator and policy algorithms, the robot's movements get closer to human or animal natural states while maintaining strong anti-interference capability.
Compared with traditional control schemes, this solution does not require detailed design of reward functions, and robots can autonomously master effortless and stable motion styles solely through adversarial learning, significantly reducing the difficulty of algorithm development.
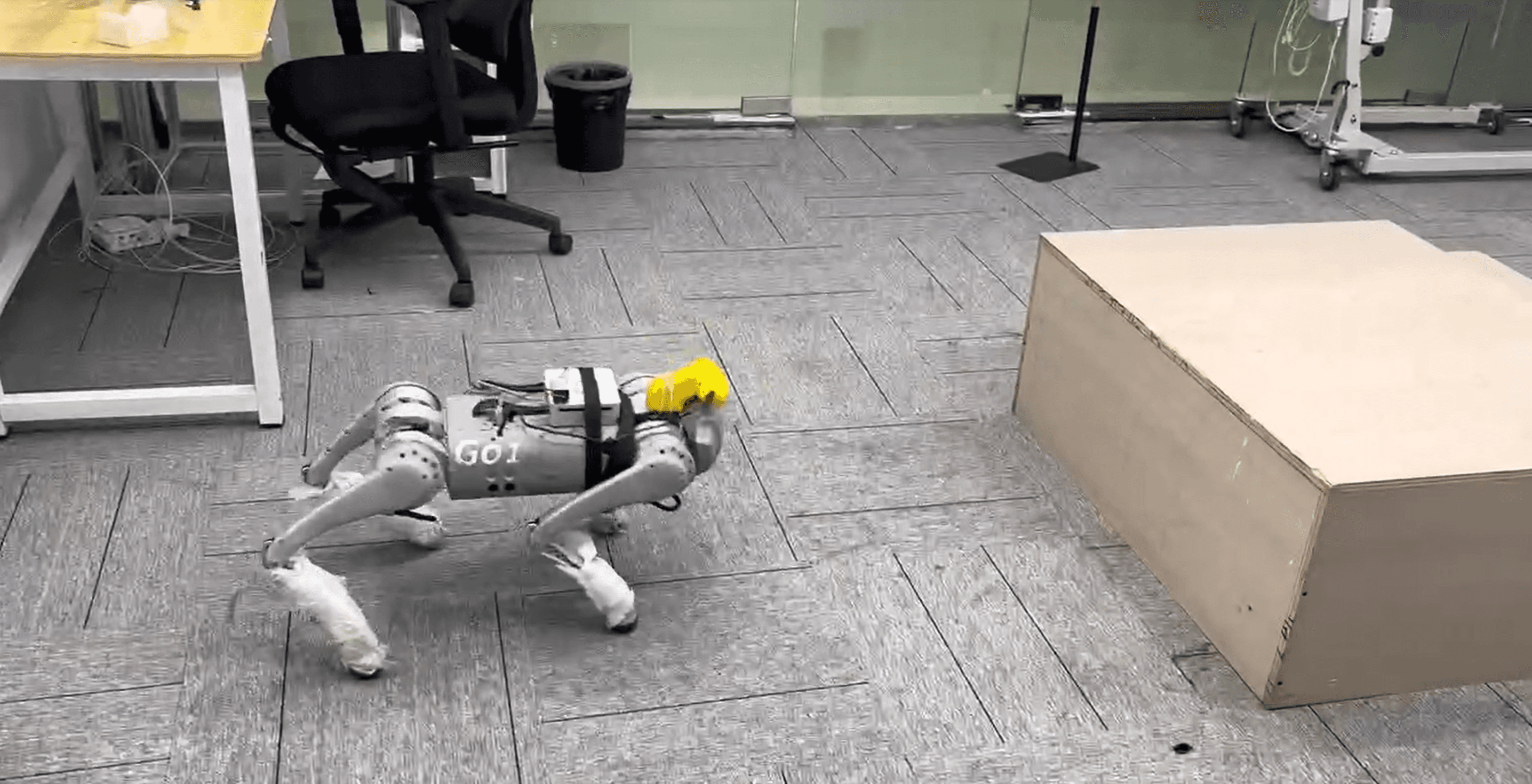
Quadrupedal robot dog overcoming obstacles with perception
Core Technology Two: Whole Body Deep Imitation Control Solution—High Precision Reproduction of Complex Human Actions
Based on the Deepmimic algorithm, BridgeDP's whole body deep imitation control solution achieves high-precision transfer of complex human actions to humanoid robots through a dual-stage model of "imitation learning + reinforcement learning." It can support complex actions such as dance and martial arts, as well as custom actions.
The core logic of this technology is: firstly, capturing human motion segments via motion capture devices, then using imitation learning to let robots "replicate" basic action frameworks; subsequently, enhancing physical feasibility through reinforcement learning to ensure stability and smoothness of actions on robot hardware.
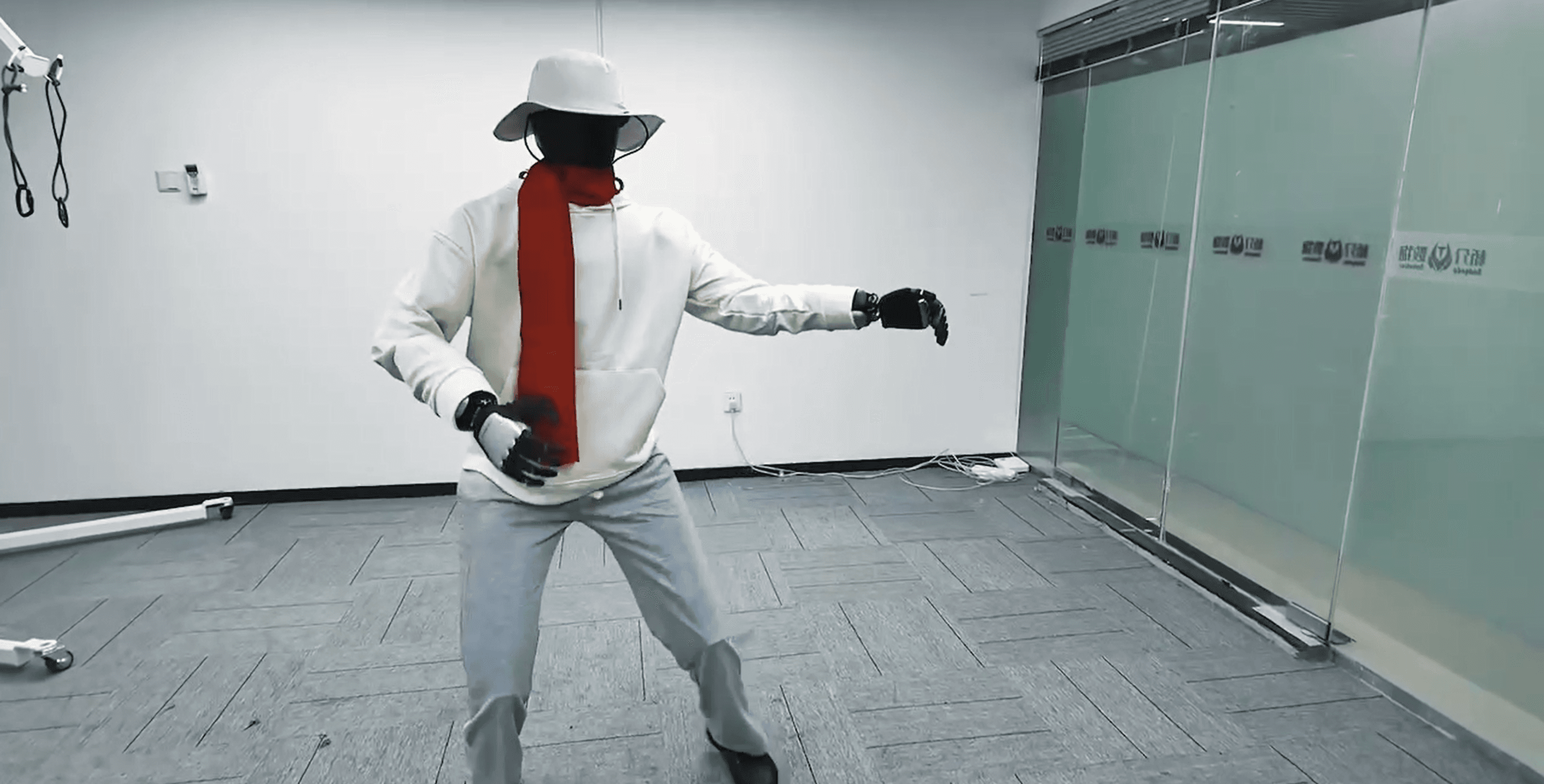
Humanoid robot full-body motion control
Core Technology Three: General-Purpose Robot Motion Development Platform—Lowering the Threshold for Action Development
BridgeDP founder Shang Yangxing publicly demonstrated the general-purpose robot motion development platform for the first time. As the core product of BridgeDP's technical experience, this platform has been used internally and is set to launch formally. The platform integrates extensive movement datasets, data preprocessing tools, automated model training, automated deployment testing, and on-device continuous operations, built upon the rich experience and industry insight from solving motion issues for clients. It drastically lowers the technical threshold for motion development, enhances the efficiency of robot motion control development, and provides critical support for general-purpose robots to quickly adapt to multiple scenarios and achieve scaled application. Developers can complete action generation and debugging with low-code operations, unleashing their creativity in robot development.
Behind the Technology: A Hardcore Team Transitioning from "Academic Labs" to "Industry Deployment"
BridgeDP was founded in May 2023. The core technical team's average age is only 26 and includes talents from top domestic and international schools like HUST, SUSTech, CMU, and Beihang University in the robotics field. Founder Shang Yangxing has been deeply engaged in robot development since his undergraduate days. Under his leadership, the team has leveraged an "academic + engineering + commercial" full-chain capability to achieve a leap from technological breakthroughs to industry deployment in just two years.
The company aims to "fill the gap in the third-party motion control market" and targets three major industry pain points: difficulty in physical transfer, low development efficiency, and poor software generality. Through Sim2real training, reinforcement learning, and deep imitation techniques, it calls on basic motion control modules as needed, lowering development costs, improving efficiency, and completing action development in as short as three days, enhancing robot action accuracy to 92% and transfer success rate to 80%, becoming one of the few domestic companies specializing in general-purpose motion control solutions. By the second quarter of 2025, their motion control solutions have been deployed by over 40 robot manufacturers.
BridgeDP's ultimate goal is to make robot motion control extremely simple and convenient. To this end, BridgeDP is committed to the technical development and algorithm iteration of general-purpose robot motion control platforms to meet customer needs for action development. Moreover, based on future forecasts, BridgeDP is transitioning its business model from project-based delivery to a License + Service Fee + Subscription model. BridgeDP hopes that robot motion control technology can be universal, efficient, and beneficial for all, making the integration of robots into various industries no longer a distant imagination.

Introduction
From August 8th to 12th, the 2025 World Robot Conference was held at the Beijing Etrong International Exhibition & Convention Center. As a leading domestic developer of general-purpose robot locomotion (motion control system), BridgeDP showcased three major technological achievements at the exhibition. Its "precise, flexible, and efficient" cutting-edge solutions not only inject new energy into general-purpose robot motion control but also provide critical support for standardized and scaled development in the industry, attracting widespread attention from fields such as industrial production, automotive manufacturing, and home services.
At this exhibition, BridgeDP founder Shang Yangxing publicly demonstrated the upcoming general-purpose robot motion development platform for the first time. Notably, 16 robot manufacturers used BridgeDP's motion control solutions on-site, fully showcasing its recognition and application breadth within the industry.
BridgeDP founder Shang Yangxing demonstrating the general-purpose robot motion development platform
During the exhibition, Huang Xiangyue, Secretary of Nanshan District, Shenzhen, visited the BridgeDP booth for guidance and took a deep dive into the company's innovative achievements and solutions in the field of general-purpose robot motion control.
Core Technology One: Omni-directional Locomotion Control Solution—Endowing Robots with Mobility
The omni-directional locomotion control solution developed by BridgeDP achieves a balance between "realism" and "robustness" through an innovative algorithm architecture. This solution can be adapted to different robot configurations, such as humanoid, quadruped, and wheeled-legged robots, learning various motion styles. It not only supports basic actions like moving forward, backward, side-stepping, in-place rotation, walking, and running but also enables complex scenarios like climbing stairs with perception. By optimizing the discriminator and policy algorithms, the robot's movements get closer to human or animal natural states while maintaining strong anti-interference capability.
Compared with traditional control schemes, this solution does not require detailed design of reward functions, and robots can autonomously master effortless and stable motion styles solely through adversarial learning, significantly reducing the difficulty of algorithm development.
Quadrupedal robot dog overcoming obstacles with perception
Core Technology Two: Whole Body Deep Imitation Control Solution—High Precision Reproduction of Complex Human Actions
Based on the Deepmimic algorithm, BridgeDP's whole body deep imitation control solution achieves high-precision transfer of complex human actions to humanoid robots through a dual-stage model of "imitation learning + reinforcement learning." It can support complex actions such as dance and martial arts, as well as custom actions.
The core logic of this technology is: firstly, capturing human motion segments via motion capture devices, then using imitation learning to let robots "replicate" basic action frameworks; subsequently, enhancing physical feasibility through reinforcement learning to ensure stability and smoothness of actions on robot hardware.
Humanoid robot full-body motion control
Core Technology Three: General-Purpose Robot Motion Development Platform—Lowering the Threshold for Action Development
BridgeDP founder Shang Yangxing publicly demonstrated the general-purpose robot motion development platform for the first time. As the core product of BridgeDP's technical experience, this platform has been used internally and is set to launch formally. The platform integrates extensive movement datasets, data preprocessing tools, automated model training, automated deployment testing, and on-device continuous operations, built upon the rich experience and industry insight from solving motion issues for clients. It drastically lowers the technical threshold for motion development, enhances the efficiency of robot motion control development, and provides critical support for general-purpose robots to quickly adapt to multiple scenarios and achieve scaled application. Developers can complete action generation and debugging with low-code operations, unleashing their creativity in robot development.
Behind the Technology: A Hardcore Team Transitioning from "Academic Labs" to "Industry Deployment"
BridgeDP was founded in May 2023. The core technical team's average age is only 26 and includes talents from top domestic and international schools like HUST, SUSTech, CMU, and Beihang University in the robotics field. Founder Shang Yangxing has been deeply engaged in robot development since his undergraduate days. Under his leadership, the team has leveraged an "academic + engineering + commercial" full-chain capability to achieve a leap from technological breakthroughs to industry deployment in just two years.
The company aims to "fill the gap in the third-party motion control market" and targets three major industry pain points: difficulty in physical transfer, low development efficiency, and poor software generality. Through Sim2real training, reinforcement learning, and deep imitation techniques, it calls on basic motion control modules as needed, lowering development costs, improving efficiency, and completing action development in as short as three days, enhancing robot action accuracy to 92% and transfer success rate to 80%, becoming one of the few domestic companies specializing in general-purpose motion control solutions. By the second quarter of 2025, their motion control solutions have been deployed by over 40 robot manufacturers.
BridgeDP's ultimate goal is to make robot motion control extremely simple and convenient. To this end, BridgeDP is committed to the technical development and algorithm iteration of general-purpose robot motion control platforms to meet customer needs for action development. Moreover, based on future forecasts, BridgeDP is transitioning its business model from project-based delivery to a License + Service Fee + Subscription model. BridgeDP hopes that robot motion control technology can be universal, efficient, and beneficial for all, making the integration of robots into various industries no longer a distant imagination.
Copyright © 2023 – 2026 BridgeDP (Shenzhen) Technology Co., Ltd. All rights reserved
© BridgeDP | Developer of a General-Purpose Robot cerebellum
Copyright © 2023 – 2026 BridgeDP (Shenzhen) Technology Co., Ltd. All rights reserved
© BridgeDP | Developer of a General-Purpose Robot cerebellum
Copyright © 2023 – 2026 BridgeDP (Shenzhen) Technology Co., Ltd. All rights reserved
© BridgeDP | Developer of a General-Purpose Robot cerebellum