ابنِ قدرات حركية من الدرجة الأولى لروبوتك بسرعة — باب التقديم للاختبار الداخلي لـ RoboCraft AI مفتوح الآن
حركات مخصصة

لطالما كنا نتساءل: هل يمكن أن يكون تطوير حركة الروبوت سهلاً وسلساً مثل تحرير مقطع فيديو أو تعديل مستند؟ وفي مواجهة الروبوتات الشبيهة بالبشر من مختلف العلامات التجارية والهياكل، هل يمكن أن يوجد في الصناعة سلسلة أدوات تطوير وعملية نشر موحدة ومتكاملة، وبناء قدرات حركية تتطور باستمرار للروبوتات؟
الواقع هو أن كلاً من مصنعي الهياكل الروبوتية والمشترين يواجهون تحديات صناعية مختلفة.
بالنسبة لشركات تصنيع الهياكل الروبوتية، يعد البحث والتطوير الذاتي لخوارزميات التحكم في الحركة من الصفر إلى الواحد معركة مكلفة للغاية. في النموذج التقليدي، يعد تطوير التحكم في الحركة ثقباً أسود يختبر بشدة "القدرات المركبة" و"الخبرة الهندسية"، حيث يتطلب من الفريق إتقان التحكم الديناميكي، والتعلم المعزز، ونمذجة المحاكاة، ونشر المحاكاة إلى الواقع (Sim2Real) على الروبوتات الحقيقية. كما أن تطبيق الحركات يعتمد بشكل كبير على الخبرة العملية لفريق الخبراء وقدرات استكشاف الأخطاء وإصلاحها. إنها عملية ذات أصول ثقيلة ودورة حياة طويلة، تتطلب استثماراً هائلاً من الموارد البشرية والوقت.
بالنسبة للمشترين في المصب من سلسلة الصناعة، وبسبب البيئة المغلقة والمجزأة في المنبع، يتطلب الأمر امتلاك قدرات تطوير ثانوية مقابلة لتلبية متطلبات المستخدمين المختلفة في السيناريوهات الحقيقية. ولكن في الماضي، كان هذا الأمر يعتمد بقوة على الخبرة ويتطلب قدرات هندسية وخوارزمية، مما يجعله غير مناسب لغالبية مستخدمي الروبوتات.
في هذه المرحلة، لا تحتاج الصناعة إلى مجرد اختراقات في خوارزميات النقاط الفردية، بل تحتاج إلى منصة تطوير حركة موحدة، وقابلة لإعادة الاستخدام، ومعيارية.
RoboCraft AI:
منصة عامة لتطوير القدرات الحركية للروبوتات
بناءً على نقاط الألم المذكورة أعلاه في الصناعة، تطلق بريدج ميد (BridgeMate) منصة RoboCraft AI — المنصة العامة لتطوير القدرات الحركية للروبوتات.
تجمع هذه المنصة تراكم الخوارزميات وخبرات هندسة Sim2Real لشركة BridgeMate في أكثر من 50 نموذج روبوت من علامات تجارية وهياكل مختلفة، محولة التقنيات على مستوى الخبراء إلى قدرات منصة موحدة وقابلة لإعادة الاستخدام وعمليات تطوير معيارية.
نأمل أن يتمكن المطورون بمساعدة هذه المنصة من بناء قدرات حركية من الدرجة الأولى للروبوتات بسرعة.
فيما يلي عرض لقدرات تطوير RoboCraft AI:
في مواجهة نقاط الألم المزدوجة لمصنعي الهياكل ومطوري تطبيقات المصب، تقدم RoboCraft AI حلولاً من بعدين.
المسار الأول:
ربط وتطوير التحكم في الحركة من 0 إلى 1 للهياكل ذاتية التطوير
موجهة لشركات البحث والتطوير للهياكل الذاتية، تقدم RoboCraft AI عملية ربط سريعة وموحدة، لتقوم بمعيرة الخطوات التي كانت تعتمد سابقاً بشكل كبير على خبرة الخبراء تدريجياً:
التحقق الذكي من معقولية نمذجة URDF: غالباً ما تظهر مشكلات هيكل الروبوت فقط عند تشغيله على روبوت حقيقي، مما يتسبب في مخاطر أمنية. يمكن للمنصة اكتشاف هذه المشكلات وتنبيه المستخدمين وإصلاحها مسبقاً في مرحلة URDF.
عملية سلامة الأجهزة وآلية الفحص: تنتشر مشكلات عدم معيارية الأجهزة بشكل واسع. لقد قامت BridgeMate بتحويل خبرات تجميع وتصحيح أخطاء الروبوتات المتعددة إلى عمليات فحص سلامة معيارية.
ضبط تلقائي للمعلمات أثناء عملية التدريب: يتطلب تدريب نماذج التحكم في الحركة ضبطاً متكرراً للمعلمات لمختلف الحركات والبيئات، وهو أمر مكلف للغاية. تحقق المنصة ضبطاً تلقائياً للمعلمات، مما يقلل بشكل كبير من التدخل البشري.
بعد إتمام الربط، يمكن للهياكل ذاتية التطوير الحصول على قدرات تحكم أساسية في الحركة وبيئة تطوير متوافقة مع النماذج الناضجة، مما يقلل بشكل كبير من الدورة الزمنية من جاهزية الأجهزة إلى التطوير المستمر.

نطاق دعم الاختبار التجريبي الداخلي: عملية ربط الهياكل ذاتية التطوير مفتوحة لتقديم الطلبات، وتخضع النماذج والدورات المحددة للتقييم والمراجعة.
المسار الثاني:
تنسيق حركات النماذج الناضجة ونشر التطبيقات
موجهة للمستخدمين الذين قاموا بالفعل بشراء نماذج روبوتات جاهزة وناضجة (شركات التأجير، مدمجي الأنظمة، صانعي المحتوى، الفرق البحثية، إلخ)، توفر RoboCraft AI سلسلة أدوات لتطوير الحركات جاهزة للاستخدام الفوري، دون الحاجة إلى تكرار عمليات الربط والتدريب.
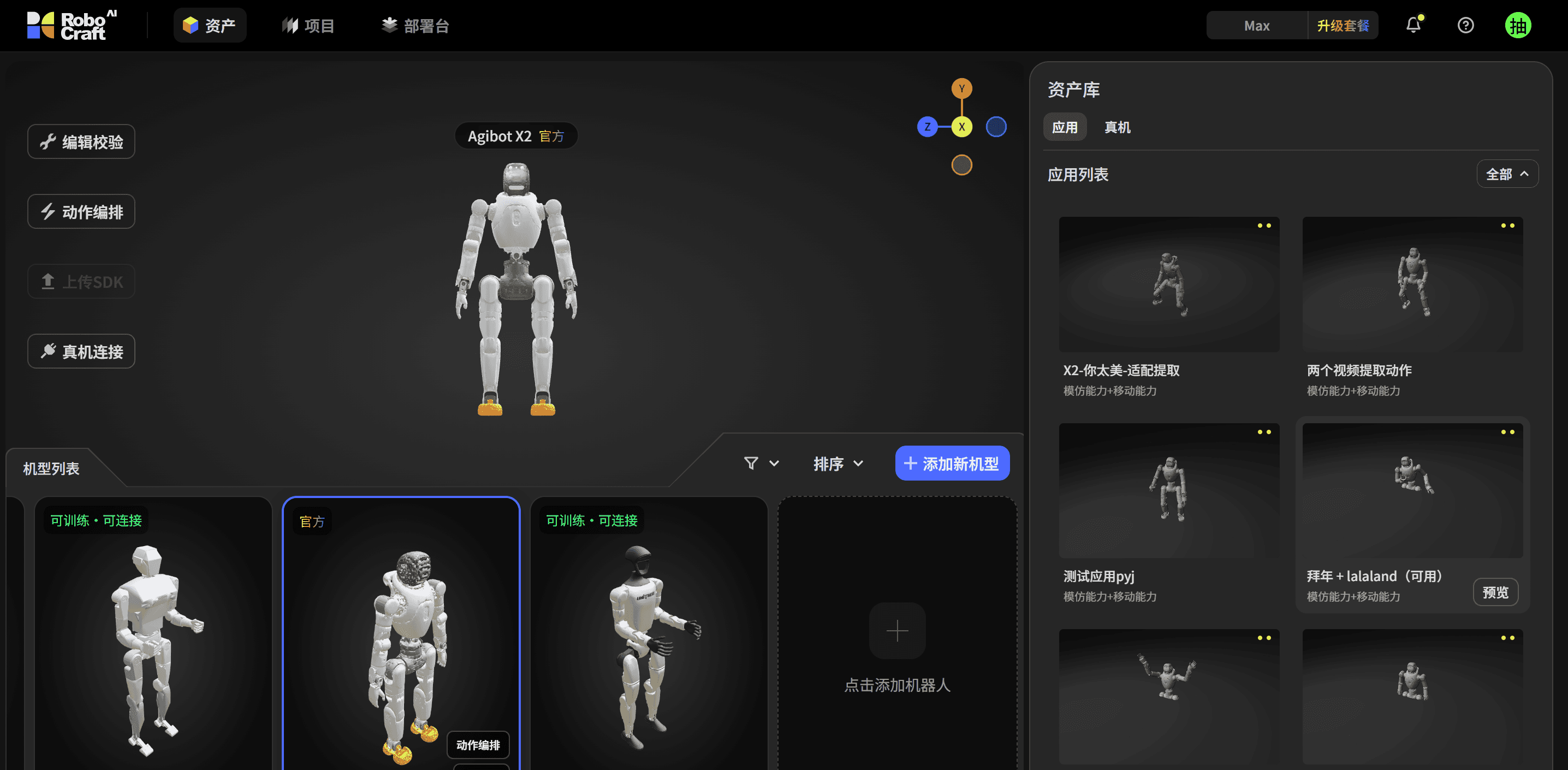
الحصول على الحركات وتنسيقها
دعم رفع فيديوهات MP4 لاستخراج الحركات، واستيراد ملفات حركات BVH؛
تنسيق مرئي عبر شريط زمني، وإكمال تركيب الحركات وتكوين عمليات العروض التجارية بأكواد برمجية منخفضة؛
إدارة مكتبة موارد حركات مدمجة، تدعم التراكم وإعادة الاستخدام داخل الفريق.
النشر والتحكم الجماعي لأجهزة متعددة
نشر الروبوتات على دفعات، وتوزيع التطبيقات بنقرة واحدة
بدء وتجهيز الروبوتات المتعددة بشكل متزامن ومتعاون
التعاون الجماعي وإدارة الأصول
إدارة مشتركة وموحدة لموارد الحركات، وقوالب التطبيقات، وتهيئات الروبوتات؛
يمكن حفظ الأصول التي طورها الأعضاء في المكتبة بنقرة واحدة، لتجنب التكرار في التطوير.
الأجهزة المتوافقة مع الاختبار التجريبي الداخلي: Unitree G1، Fourier X2؛ ويجري التوسع المستمر لدعم المزيد من العلامات التجارية والنماذج.
فتح باب تقديم الطلبات للاختبار التجريبي الداخلي رسمياً
خلال فترة الاختبار التجريبي، سنقدم المزايا التالية
الحصول المجاني ونشر العديد من تطبيقات الرقص الشهيرة لطرازات مثل Unitree G1 وFourier X2؛
استخدام غير محدود لميزة تخصيص الحركات بحرية.
نرحب بشكل خاص بطلب المجموعات التالية للاختبار التجريبي الداخلي
شركات البحث والتطوير لهياكل الروبوتات التي ترغب في الحصول بسرعة على قدرات حركة ناضجة؛
شركات تأجير الروبوتات ومدمجي الأنظمة الذين يرغبون في نشر تطبيقات العروض التجارية للروبوتات، والترويج السياحي والثقافي، والتعليم والعروض بسرعة؛
الجامعات والمؤسسات البحثية التي ترغب في إجراء أبحاث علمية وتعليمية مستخدمة الروبوتات؛
الجيل الجديد من المطورين الذين يرغبون في استكشاف ابتكارات محتوى الروبوتات وتطوير الحركات وابتكار التطبيقات.
امسح رمز الاستجابة السريعة (QR) للتقديم:

بعد الموافقة على الطلب، يمكن للمستخدمين التسجيل وتسجيل الدخول وإنشاء منظماتهم بأنفسهم. كما سنقوم بدعوة المستخدمين للانضمام إلى مجموعة التواصل الأساسية للاختبار التجريبي لـ RoboCraft AI، لدفع تطوير المنتج وتحديثه جنباً إلى جنب مع فريق BridgeMate.
لطالما كنا نتساءل: هل يمكن أن يكون تطوير حركة الروبوت سهلاً وسلساً مثل تحرير مقطع فيديو أو تعديل مستند؟ وفي مواجهة الروبوتات الشبيهة بالبشر من مختلف العلامات التجارية والهياكل، هل يمكن أن يوجد في الصناعة سلسلة أدوات تطوير وعملية نشر موحدة ومتكاملة، وبناء قدرات حركية تتطور باستمرار للروبوتات؟
الواقع هو أن كلاً من مصنعي الهياكل الروبوتية والمشترين يواجهون تحديات صناعية مختلفة.
بالنسبة لشركات تصنيع الهياكل الروبوتية، يعد البحث والتطوير الذاتي لخوارزميات التحكم في الحركة من الصفر إلى الواحد معركة مكلفة للغاية. في النموذج التقليدي، يعد تطوير التحكم في الحركة ثقباً أسود يختبر بشدة "القدرات المركبة" و"الخبرة الهندسية"، حيث يتطلب من الفريق إتقان التحكم الديناميكي، والتعلم المعزز، ونمذجة المحاكاة، ونشر المحاكاة إلى الواقع (Sim2Real) على الروبوتات الحقيقية. كما أن تطبيق الحركات يعتمد بشكل كبير على الخبرة العملية لفريق الخبراء وقدرات استكشاف الأخطاء وإصلاحها. إنها عملية ذات أصول ثقيلة ودورة حياة طويلة، تتطلب استثماراً هائلاً من الموارد البشرية والوقت.
بالنسبة للمشترين في المصب من سلسلة الصناعة، وبسبب البيئة المغلقة والمجزأة في المنبع، يتطلب الأمر امتلاك قدرات تطوير ثانوية مقابلة لتلبية متطلبات المستخدمين المختلفة في السيناريوهات الحقيقية. ولكن في الماضي، كان هذا الأمر يعتمد بقوة على الخبرة ويتطلب قدرات هندسية وخوارزمية، مما يجعله غير مناسب لغالبية مستخدمي الروبوتات.
في هذه المرحلة، لا تحتاج الصناعة إلى مجرد اختراقات في خوارزميات النقاط الفردية، بل تحتاج إلى منصة تطوير حركة موحدة، وقابلة لإعادة الاستخدام، ومعيارية.
RoboCraft AI:
منصة عامة لتطوير القدرات الحركية للروبوتات
بناءً على نقاط الألم المذكورة أعلاه في الصناعة، تطلق بريدج ميد (BridgeMate) منصة RoboCraft AI — المنصة العامة لتطوير القدرات الحركية للروبوتات.
تجمع هذه المنصة تراكم الخوارزميات وخبرات هندسة Sim2Real لشركة BridgeMate في أكثر من 50 نموذج روبوت من علامات تجارية وهياكل مختلفة، محولة التقنيات على مستوى الخبراء إلى قدرات منصة موحدة وقابلة لإعادة الاستخدام وعمليات تطوير معيارية.
نأمل أن يتمكن المطورون بمساعدة هذه المنصة من بناء قدرات حركية من الدرجة الأولى للروبوتات بسرعة.
فيما يلي عرض لقدرات تطوير RoboCraft AI:
في مواجهة نقاط الألم المزدوجة لمصنعي الهياكل ومطوري تطبيقات المصب، تقدم RoboCraft AI حلولاً من بعدين.
المسار الأول:
ربط وتطوير التحكم في الحركة من 0 إلى 1 للهياكل ذاتية التطوير
موجهة لشركات البحث والتطوير للهياكل الذاتية، تقدم RoboCraft AI عملية ربط سريعة وموحدة، لتقوم بمعيرة الخطوات التي كانت تعتمد سابقاً بشكل كبير على خبرة الخبراء تدريجياً:
التحقق الذكي من معقولية نمذجة URDF: غالباً ما تظهر مشكلات هيكل الروبوت فقط عند تشغيله على روبوت حقيقي، مما يتسبب في مخاطر أمنية. يمكن للمنصة اكتشاف هذه المشكلات وتنبيه المستخدمين وإصلاحها مسبقاً في مرحلة URDF.
عملية سلامة الأجهزة وآلية الفحص: تنتشر مشكلات عدم معيارية الأجهزة بشكل واسع. لقد قامت BridgeMate بتحويل خبرات تجميع وتصحيح أخطاء الروبوتات المتعددة إلى عمليات فحص سلامة معيارية.
ضبط تلقائي للمعلمات أثناء عملية التدريب: يتطلب تدريب نماذج التحكم في الحركة ضبطاً متكرراً للمعلمات لمختلف الحركات والبيئات، وهو أمر مكلف للغاية. تحقق المنصة ضبطاً تلقائياً للمعلمات، مما يقلل بشكل كبير من التدخل البشري.
بعد إتمام الربط، يمكن للهياكل ذاتية التطوير الحصول على قدرات تحكم أساسية في الحركة وبيئة تطوير متوافقة مع النماذج الناضجة، مما يقلل بشكل كبير من الدورة الزمنية من جاهزية الأجهزة إلى التطوير المستمر.
نطاق دعم الاختبار التجريبي الداخلي: عملية ربط الهياكل ذاتية التطوير مفتوحة لتقديم الطلبات، وتخضع النماذج والدورات المحددة للتقييم والمراجعة.
المسار الثاني:
تنسيق حركات النماذج الناضجة ونشر التطبيقات
موجهة للمستخدمين الذين قاموا بالفعل بشراء نماذج روبوتات جاهزة وناضجة (شركات التأجير، مدمجي الأنظمة، صانعي المحتوى، الفرق البحثية، إلخ)، توفر RoboCraft AI سلسلة أدوات لتطوير الحركات جاهزة للاستخدام الفوري، دون الحاجة إلى تكرار عمليات الربط والتدريب.
الحصول على الحركات وتنسيقها
دعم رفع فيديوهات MP4 لاستخراج الحركات، واستيراد ملفات حركات BVH؛
تنسيق مرئي عبر شريط زمني، وإكمال تركيب الحركات وتكوين عمليات العروض التجارية بأكواد برمجية منخفضة؛
إدارة مكتبة موارد حركات مدمجة، تدعم التراكم وإعادة الاستخدام داخل الفريق.
النشر والتحكم الجماعي لأجهزة متعددة
نشر الروبوتات على دفعات، وتوزيع التطبيقات بنقرة واحدة
بدء وتجهيز الروبوتات المتعددة بشكل متزامن ومتعاون
التعاون الجماعي وإدارة الأصول
إدارة مشتركة وموحدة لموارد الحركات، وقوالب التطبيقات، وتهيئات الروبوتات؛
يمكن حفظ الأصول التي طورها الأعضاء في المكتبة بنقرة واحدة، لتجنب التكرار في التطوير.
الأجهزة المتوافقة مع الاختبار التجريبي الداخلي: Unitree G1، Fourier X2؛ ويجري التوسع المستمر لدعم المزيد من العلامات التجارية والنماذج.
فتح باب تقديم الطلبات للاختبار التجريبي الداخلي رسمياً
خلال فترة الاختبار التجريبي، سنقدم المزايا التالية
الحصول المجاني ونشر العديد من تطبيقات الرقص الشهيرة لطرازات مثل Unitree G1 وFourier X2؛
استخدام غير محدود لميزة تخصيص الحركات بحرية.
نرحب بشكل خاص بطلب المجموعات التالية للاختبار التجريبي الداخلي
شركات البحث والتطوير لهياكل الروبوتات التي ترغب في الحصول بسرعة على قدرات حركة ناضجة؛
شركات تأجير الروبوتات ومدمجي الأنظمة الذين يرغبون في نشر تطبيقات العروض التجارية للروبوتات، والترويج السياحي والثقافي، والتعليم والعروض بسرعة؛
الجامعات والمؤسسات البحثية التي ترغب في إجراء أبحاث علمية وتعليمية مستخدمة الروبوتات؛
الجيل الجديد من المطورين الذين يرغبون في استكشاف ابتكارات محتوى الروبوتات وتطوير الحركات وابتكار التطبيقات.
امسح رمز الاستجابة السريعة (QR) للتقديم:
بعد الموافقة على الطلب، يمكن للمستخدمين التسجيل وتسجيل الدخول وإنشاء منظماتهم بأنفسهم. كما سنقوم بدعوة المستخدمين للانضمام إلى مجموعة التواصل الأساسية للاختبار التجريبي لـ RoboCraft AI، لدفع تطوير المنتج وتحديثه جنباً إلى جنب مع فريق BridgeMate.
حقوق النشر © 2023 – 2026 桥介数物(深圳)科技有限公司 جميع الحقوق محفوظة
© تشياوجي شووود | مطور أنظمة تشغيل الروبوتات العامة
حقوق النشر © 2023 – 2026 桥介数物(深圳)科技有限公司 جميع الحقوق محفوظة
© تشياوجي شووود | مطور أنظمة تشغيل الروبوتات العامة
حقوق النشر © 2023 – 2026 桥介数物(深圳)科技有限公司 جميع الحقوق محفوظة
© تشياوجي شووود | مطور أنظمة تشغيل الروبوتات العامة