روبوت بشري
روبوت بشري
المصادر المفتوحة لها دلالات واضحة في صناعة الروبوتات.
في السابق، كان الروبوت الرباعي Min cheetah التابع لمعهد ماساتشوستس للتكنولوجيا (MIT) قد تم طرحه كمصدر مفتوح بالكامل، مما ساهم بشكل كبير في تعزيز الابتكار التكنولوجي والتعاون الصناعي، مما خفض عتبة البحث والتطوير في الروبوتات بشكل كبير، وازدهرت الروبوتات الرباعية، وشارك المزيد من فرق البحث والتطوير في جميع أنحاء العالم في تطوير المنتجات ذات الصلة وتصنيعها، والتحقق من أفكارهم. هذا بلا شك يعجل بمشاركة الموارد العالمية والتعاون الصناعي، مما يساهم في تقديم المزيد من الإمكانيات لعصر الروبوتات.
الروبوتات البشرية، باعتبارها واحدة من أكثر مجالات الروبوتات شعبية اليوم، تُعتبر واحدة من أكثر المنتجات التي يتطلع إليها الناس. لكن دمج البرمجيات والأجهزة للروبوتات البشرية يعد تحديًا كبيرًا، لإنتاج روبوت بشري يعمل بفاعلية وثبات، يجب أن تتقن المهارات في عدة مجالات، بما في ذلك التصميم الميكانيكي والهندسة الإلكترونية وعلوم الحاسوب. كما يتطلب الأمر دراسة وتطوير في خوارزميات مثل الإدراك والتحكم، كما أن التكلفة ليست رخيصة. وهذا يؤدي إلى قلة البحث والتطوير والاهتمام من قبل الباحثين والمطورين في هذا المجال، مما يحد من الأبحاث اللاحقة المتعلقة بالذكاء الاصطناعي والتعلم الآلي على الروبوتات البشرية.

فهل يمكن أن يدفع روبوت بشري مفتوح المصدر زر تسريع بحث الروبوتات البشرية؟
نظرة عامة على المنتجات مفتوحة المصدر
مؤخراً، علمت مجلة دردشة الروبوتات أن شركتين محليتين باسم 【因克斯智能】 و 【桥介数物】 تخططان لطرح روبوتات ثنائية الأرجل كمصدر مفتوح، تشمل خوارزميات التحكم الأساسية وبناء الأجهزة. حصلت مجلة دردشة الروبوتات على بيانات المنتج الحصرية لهذا الروبوت.

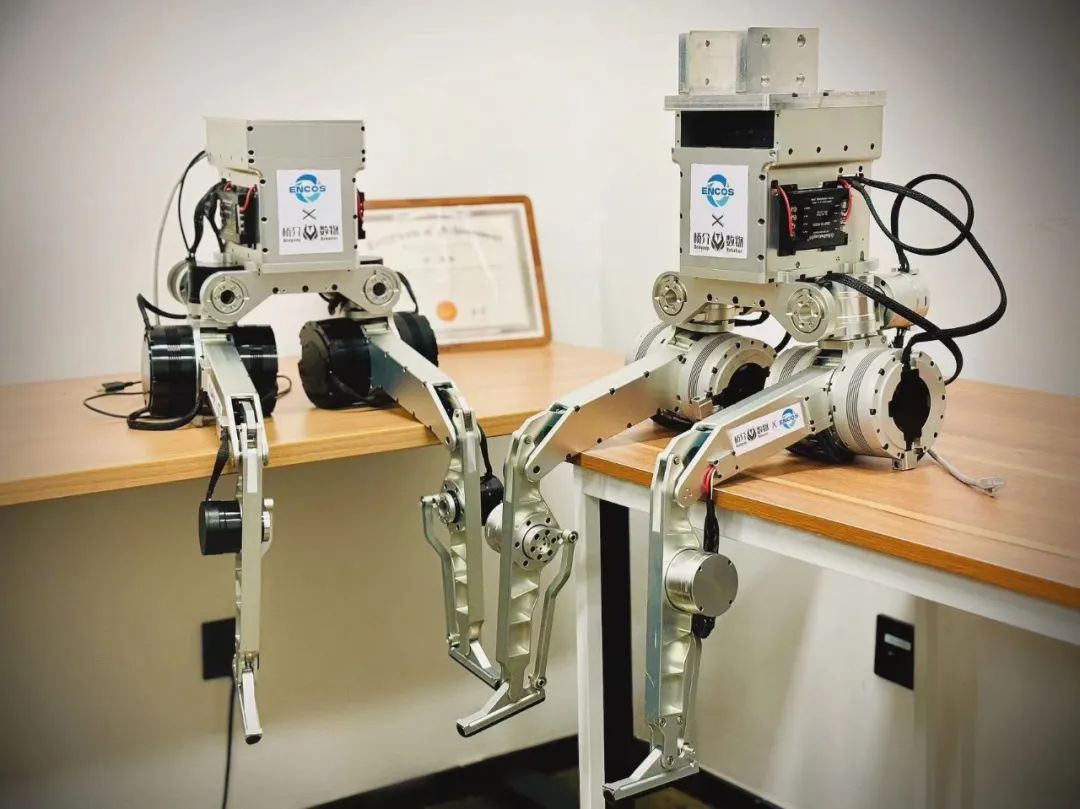
من حيث الشكل، يتميز المنتج الروبوت البشري المفتوح المصدر EC-Hunter80-V01 بتصميم فريد للساقين، بدون الجزء العلوي أو الذراعين، كما تمت إزالة الأجزاء الخارجية غير الضرورية حاليًا، مع الاحتفاظ فقط بالمكونات الأساسية، مما يجعل الروبوت خفيف الوزن إلى أقصى حد. وهذا يشبه نموذج الروبوتات البشرية الذي طورته شركة Agility Robotics باستخدام "ساق النعام"، حيث كلاهما يعبر عن تصميم هندسي بسيط للغاية. وحقق نموذج cassie تحديثه ليشمل الجزء العلوي والذراعين ليصبح روبوت Digit ويخطط لإنتاج 10,000 وحدة سنويًا.
فيما يتعلق بالمواصفات التقنية، يبلغ ارتفاع EC-Hunter80-V01 785.97 مم، وعرضه الأمامي والخلفي 178 مم، وعرضه الجانبي 330.4 مم، ولديه 10 درجات من الحرية، ووزنه حوالي 12 كجم، كما يحمل الروبوت بطارية ليثيوم بسعة 5300 مللي أمبير، ورغم أن هذه البطارية لا تأتي مع نظام إدارة بطارية موحد، لكنها توفر عرض مستوى البطارية وإنذار بانخفاض مستوى الشحن. يتضمن الروبوت مآخذ الطاقة 5V10A و19V12.5A. والفتح والتوافق لنظام التحكم وأجزائه الكهربائية جيدة جدًا.

بالنسبة لوحدة التحكم، يستخدم EC-Hunter80-V01 منصة تحكم nucwski7 وواجهة تحكم EtherCAT، وتستخدم واجهة EtherCAT وحدة تحويل EtherCAT إلى CAN التي تم تطويرها ذاتيًا بواسطة 因克斯智能 بسرعة عالية، حيث يمكن للوحدة التي تحمل 6 محركات تحقيق معدل إطار اتصالات يصل إلى 1 كيلوهرتز، بينما يمكن لوحدة تحمل 2 محرك تحقيق معدل إطار يصل إلى 2 كيلوهرتز.
باستخدام وحدة تحويل EtherCAT إلى CAN، يمكن بسهولة حل الاتصال بين نظام لينوكس والمحركات المفصلية. حيث أن اتصال CAN موثوق وله قدرة عالية على مقاومة التداخل وتكلفته المنخفضة وحجمه الصغير، بينما تستخدم EtherCAT منفذ RJ45، والذي يعتبر أكبر حجمًا لكنه ينقل بيانات بكميات كبيرة في وقت واحد، مما يسهل الاتصال مع أنظمة مثل لينوكس. لذلك، فإن استخدام EtherCAT لتحويل CAN كحلقة وصل بين المكونات المفصلية ومنصة التحكم في الروبوتات الرباعية هو اختيار جيد. كما لاحظنا أن وحدة IMU الخاصة بالروبوت تستخدم أيضًا وحدة EtherCAT التي تم تطويرها ذاتياً من قبل 因克斯智能، حيث تشترك مع نظام التحكم في المحرك على نفس الحافلة. وهذا لا يسهل فقط بنية الأجهزة الكلية، بل يضمن أيضًا متانة الاتصال.
السبب في أن المنتج مخصص فقط للنصف السفلي من الساق هو أن 因克斯智能 تعتقد أن أحد النقاط التقنية الرئيسية التي تعوق الاستخدام الواسع النطاق للروبوتات الثنائية الأرجل هو التوازن الحركي للأطراف السفلية، وهو أيضًا تحدٍ تركز عليه العديد من شركات الروبوتات في العالم. لذلك، في منصة الأجهزة، تركز EC-Hunter80-V01 على الحفاظ على الجزء السفلي من الساقين الثنائية، لكنها تدعم أيضًا إمكانية تحديث المستخدم الحر.

الخوارزميات هي الجزء الأساسي من الروبوتات البشرية، بما في ذلك التحكم الحركي، والإدراك، واتخاذ القرار، وتستخدم 因克斯智能 طريقة التحكم المعتمدة على النموذج، مع إطار خوارزمية MPC+WBC دمج الإدراك والموضع، وتخطيط الخطوات، وحساب اللمس لمراقبة الروبوتات الرباعية بعناية.
كشفت 因克斯智能 لمجلة دردشة الروبوتات أنهم يخططون لفتح مصدر الشيفرة الأساسية للروبوت EC-Hunter80-V01، وتتضمن الشيفرة التواصل على مستوى منخفض وخوارزمية التحكم بالحركة الثنائية الأرجل، وتخطيط الخطوات ومكونات التصحيح، كما سيتم فتح مصدر الهيكل الكامل للروبوت، بالإضافة إلى خيارات وحدات الأجهزة المستخدمة.
هذا يعني أنه على أساس هذا الروبوت المفتوح المصدر، يمكن للمستخدمين تعديل وتحسين هيكل الروبوت على الأجهزة، مثل زيادة درجات الحرية للروبوت، وزيادة مفاصل الأصابع في القدم، وزيادة مكونات الشكل، إلخ. نظرًا لأن قدرة التحميل لهذا الروبوت تصل إلى 15 كجم، يمكن إضافة ذراعي الروبوت، أو حتى أربعة أطراف، ونظم بصرية وما إلى ذلك.
وعلى المستوى البرمجي، يمكن للمستخدمين أيضًا تحسين خوارزمية التحكم في الروبوت على أساس الشيفرة المفتوحة المصدر، على سبيل المثال، يمكنهم إدخال خوارزمية التعلم المعزز، مما يمكن أن يعزز التحكم في استقرار الروبوت. بشكل عام، تكون مساحة التعديل وحرية التوسع كبيرة جدًا.
خلال المقابلة، ذكرت 因克斯智能 أن الشيفرة البرمجية للروبوت قد تم فتحها بشكل مستقل، ومن المتوقع أن يتم تحميلها إلى github قبل عشية السنة الجديدة (8 فبراير 2024)، والعنوان المحدد هو (https://github.com/bridgedp )، في حين أن منصة الأجهزة سيتم بيعها بشكل منفصل، ومن المتوقع أن يكون السعر التقريبي حوالي 180,000 يوان.
أسس المصادر المفتوحة
إن تحقيق درجة عالية من الانفتاح في المصادر يعتمد بشكل أساسي على تطوير وإنتاج مكونات التحكم الحركي الأساسية داخليًا.
في تقارير مجلة دردشة الروبوتات السابقة حول "هل حان الوقت لظهور فرص جديدة في سوق قطع الغيار للروبوتات البشرية؟" تم التركيز على شركة 因克斯智能. لم تكن هذه الشركة قد بدأت عملها لفترة طويلة، حيث كان الفريق في البداية يركز بشكل أساسي على تطوير وحدات مفاصل الروبوت، ولكن التقنية لديها خصوصية قوية جدًا، حيث يتميز المنتج النهائي بكثافة عزم الدوران العالية ووزنها الخفيف. على سبيل المثال، يحتوي منتج يسمى EC-A8112-P1-18 على عزم دوران ذروة قدره 90 نيوتن متر، ووزن 840 جرام، في حين أن منتجًا آخر يسمى EC-A4310-P2-36 يتمتع بعزم دوران ذروة قدره 36 نيوتن متر ويزن فقط 377 جرام.

في EC-Hunter80-V01، لاحظنا أيضًا ميزات خفيفة الوزن. على عكس معظم الروبوتات البشرية التي تزن عشرات الكيلوغرامات، فإن وزن EC-Hunter80-V01 هو أقل من 12 كجم، مما يزيد بشكل كبير من سهولة وأمان عمليات التطوير، ويعزز غير مباشرة صلابة التحكم الحركي للروبوت.
ويرجع ذلك إلى أن وحدات المفاصل المستخدمة في الروبوت هي من ضمن المنتجات الأكثر تنافسية التي تطورها 因克斯智能، EC-A8112-P1-18 و EC-A4310-P2-36. إن تكامل المنتجين يتميز بتبسيط بنية تصميم الروبوت البشري وتقليل صعوبة الصيانة، كما أنه يقلل من الأسلاك ويحل مشكلة تكييف المنتجات المختلفة معاً، ويرتبط هذا الاستقرار الكلي للبرمجيات والأجهزة بشكل ملحوظ. لكن من حيث الأداء، تصل كثافة عزم الدوران للمنتجين إلى أكثر من 100Newtons/kg، مما يوفر قوة دافعة قوية للحركات الروبوتات البشرية.

وفقًا لمجلة دردشة الروبوتات، كانت جهود 因克斯智能 متركزة في البداية على تطوير وإنتاج الوحدات، ولم تبدأ في بحث الروبوتات البشرية. لكن أثناء خدمة المستخدمين الجدد، عادة ما يحتاج الشركة إلى استثمار الكثير من الجهد للتواصل مع العملاء وإثبات الفعالية الوحدات المستخدمة في الروبوتات الثنائية الأرجل. وبالتالي، فإن إنشاء نموذج للروبوت يمكن أن يوفر الكثير من الوقت.
وخلال عملية إنشاء النظام الإيكولوجي، وجدت 因克斯智能 فرصة للعمل مع 【桥介数物】، وهي الشركة التي تركز على خوارزميات الروبوتات. وبشكل متبادل، فتحوا مشروعًا تعاونيًا، واستفادوا من مزايا كل شركة لبناء هذا الروبوت الثنائي الأرجل المفتوح المصدر، لتقديم خدمة أفضل للعملاء.
يُذكر أن شركة 【桥介数物】 تتألف من أعضاء من مؤسسات التعليم العالي مثل جامعة سان شين، وشركة بكين، وجامعة هوا تشي، وجامعة تسينغهوا وغيرها، وتهدف إلى تطوير تقنيات التحكم في حركة الروبوتات البشرية والرباعية ومنتجات الوحدة. وقد حقق الفريق تقدمًا ملحوظًا خلال نصف عام فقط، حيث نجحوا في تحقيق تقدم من صفر إلى واحد في السيطرة على مشية الروبوت البشري الثنائي الأرجل في شهر واحد؛ وسيستمر الفريق في التركيز على اتجاهات مثل التعلم الآلي للروبوتات والتعلم بالمحاكاة لتطوير التقنيات.
في هذه الشراكة، تقوم 因克斯智能 بتوفير الأجهزة الأساسية الروبوت، بينما تعمل 【桥介数物】 على تطوير خوارزميات التحكم المناسبة، بينما ستتحمل 因克斯智能 مسؤولية التحديثات لأقسام مختلفة فيما بعد.
تؤمن 因克斯智能 أن هذا الروبوت هو مجرد بداية وليس نهاية، حيث ستتعاون الشركتان على مدى طويل لتحديث هذه النسخة المفتوحة من الروبوت. في خطط التطوير، يتمثل هدف 因克斯智能 في زيادة الذراعين في النسخة 2.0 من الروبوت بناء على النسخة 1.0، كما ستُضاف خصائص بصرية للنسخة 3.0، وفي النسخة 3.0 وما بعدها سيتم التفكير في تصميم الروبوت ليبلغ طوله حوالي 1.7 متر، مما يتيح للروبوت القيام بمزيد من العروض، ويسهل على الباحثين تطوير أبحاث الروبوتات.

الخاتمة والمستقبل
في السابق، كانت غالبية مشاريع المصدر المفتوح في مجال الروبوتات تأتي من دول غربية. كأحد الروبوتات البشرية النادرة التي تم تطويرها كمصدر مفتوح في الصين، يُظهر EC-Hunter80-V01 ليس فقط التقدم الكبير في النظام الإيكولوجي لصناعة الروبوتات البشرية في الصين، ولكن أيضًا يبرز الروح التشاركية والرؤية العميقة للتواصل في مجال الروبوتات البشرية. نأمل أن ускорит EC-Hunter80-V01، هذا الروبوت الزناني الثنائي الأرجل المفتوح المصدر من عملية تطوير الصناعة بأسرها، ويعجل من استخدام الروبوتات البشرية العامة في جميع أنحاء العالم.
“من المؤكد أن التطورات العالمية في الروبوتات مفتوحة المصدر ستحدث عاجلاً أم آجلاً. تمامًا كما هو الحال مع أنظمة التشغيل على أجهزة الكمبيوتر، فهناك أنظمة مدفوعة وأخرى مفتوحة المصدر، كما أن أنظمة الهواتف المحمولة تتضمن أيضًا أنظمة مفتوحة المصدر. وحيث أن السوق المستقبلية للروبوتات ضخمة، فجامت أنواع الروبوتات المفتوحة المصدر ستكون حتمية.” قال زو زونغ هوانغ، الرئيس التنفيذي لشركة 因克斯智能. بينما قال المؤسس لشركة 【桥介数物】 شانغ يانغ شينغ “تطوير مجتمع الروبوتات لا يمكن أن ينفصل عن قوة المصادر المفتوحة، وقد استفدنا في الماضي كثيرًا من مجتمع المصادر المفتوحة. نتمنى الاستمرار في المساهمة لمجتمع الروبوتات، والعمل مع الزملاء لتطوير الروبوتات العامة في الصين والعالم.”